
- Функциональные особенности стрелочных приводов сортировочных станций
- Исследование рабочего режима БСП. Методика определения оптимального времени перевода стрелки ГАЦ
- Исследование работы БСП в режиме перевода стрелки. Определение необходимого тягового усилия на шибере БСП
- Исследование динамики движения остряков в конце перевода стрелки, оборудованной БСП
- Исследование работы электропривода в режиме взреза стрелки
- Выводы по главе
Цикл статей:
Глава 1 — Введение. Цели и задачи исследований.
Глава 2 — Структурный анализ режимов работы БСП
Глава 3 — Методы защиты стрелочного перевода от ложного контроля
Глава 4 — Методы построения быстродействующих стрелочных приводов
Заключение.
Функциональные особенности стрелочных приводов сортировочных станций
Быстродействующий стрелочный электропривод является одним из основных устройств управления сортировочной станцией, от надежной работы которого зависит четкость и бесперебойность всего технологического процесса обработки поездов. Быстродействующие стрелочные электроприводы, применяемые на сортировочных станциях, разделяются на горочные и маневровые.
Работа приводов горочной автоматической централизации характеризуется: маленькими временными интервалами между отцепами и как следствие — высоким быстродействием электропривода (время перевода около 0,5 с); небольшими нагрузками (до 2000 Н), благодаря применению на горках «легких» стрелок; небольшим удалением от источников питания (до 200 м).
Для приводов маневровых районов — большое количество маневровых операций и как следствие высокая интенсивность движения поездов; меньшее быстродействие электропривода (время перевода стрелки 1,5+3,5 с), значение усилия перевода достигает 3500 Н и значительное удаление от источников питания (до 2 км).
Алгоритм работы быстродействующего стрелочного привода заключается в выполнении следующих операций: после включения электродвигателя, вал последнего начинает свободное вращение, или холостой ход. Во время холостого хода автопереключатель выключает контрольное реле, сигнализирует о начавшемся переводе стрелки, одновременно подготавливается цепь реверсирования. Следующий этап — отпирание стрелки. За отпиранием следует рабочий ход шибера электропривода. В конце рабочего хода шибера стрелка занимает новое крайнее положение. Заключительный этап — запирание стрелки, получение сигнала контроля ее крайнего положения и выключение двигателя. После выключения электродвигателя кинетическая энергия якоря и других вращающихся масс электропривода частично гасится фрикционом-тормозом и трением об стрелочные подкладки. Если электродвигатель в конце перевода не выключился, то привод начинает работать на фрикцию. Это длится до тех пор, пока двигатель не будет выключен или возвращен в исходное положение.
Работа быстродействующих стрелочных электроприводов характеризуется четырьмя режимами:
- Режим перевода стрелки (активный режим). В этом режиме стрелочный электропривод выполняет следующие функции:
- включение в работу электродвигателя и начало движения силового механизма;
- потеря контроля и размыкание шибера электропривода;
- перевод шибера, соответственно, остряков стрелки из одного крайнего положения в другое;
- замыкание шибера, отключение электродвигателя и получение контроля стрелки.
- Статический (пассивный) режим работы. Обеспечивает замыкание шибера с заданным усилием с сохранением непрерывного контроля положения стрелки.
- Динамический режим работы. Заключается в выполнении тех же функций, что и статический режим работы, но в условиях прохождения подвижного состава по стрелке. Характеризуется восприятием электроприводом и гарнитурой со стороны колесных пар динамических воздействий — вибраций, усилий, ударов, упругих деформаций и пр.
- Режим взреза стрелки. Такой режим работы характеризуется прохождением подвижного состава в пошерстном направлении по стрелке, не обеспечивающей данный маршрут движения. Взрез является результатом нарушения организации движения поездов.
Исследование рабочего режима БСП. Методика определения оптимального времени перевода стрелки ГАЦ
Важнейшим исходным параметром, определяющим быстродействие горочных стрелок, является максимально допустимое время их перевода. Время перевода стрелки Тпс— это время, исчисляемое с момента поступления управляющего воздействия в устройства управления стрелкой до окончания перевода, которое должно обеспечивать следующее условие:
Tmin — минимальное время перевода стрелки; Тмах — максимальное время перевода стрелки.
Однако, в рассмотренных работах [23, 25,2 6,3 3,44] величина Тпс рассматривается как исходная и заранее заданная. Следовательно, решать приведенные уравнения относительно Тпс для исследования их на экстремум и определение таким путем минимальных значений Тпс лишено смысла.
Поэтому рассмотрим методику определения времени перевода стрелки Тпс на примере четырехосных вагонов, которые составляют подавляющее большинство в вагонном парке.
На расчетной схеме, представленной на рисунке 2.1, используются следующие обозначения:
а — угол крестовины стрелки (марка крестовины); а — расстояние между продольными осями колесных пар в тележке; Ь — база расчетного вагона; с — длина предстрелочного участка;
с1 — расстояние от начала рамных рельсов до начала остряков; Ь — длина остряков;
/- расстояние от корня остряков до оси стыков.
Требования безопасности будут выполнены, если перевод стрелки будет производиться при отсутствии на ней вагона (отцепа). Процесс автоматизации расформирования/формирования составов на сортировочной станции подразумевает, что стрелочный перевод оборудован датчиком, фиксирующим наличие на нем отцепа.
При этом необходимо выполнить следующие условия:
- присутствие отцепа на стрелке определяется сигналом занятости рельсовой цепи с+с1+Ь+/, которая для повышения надежности действия может быть оснащена дополнительными датчиками;
- длина рельсовой цепи стрелки не должна быть меньше базы расчетного вагона Ь <
- в составе рельсовой цели предусмотрен защитный участок (13=с + с1) для обеспечения завершения перевода стрелки до подхода к острякам первой колесной пары вагона. При этом соблюдается условие, что перевод стрелки начался до или одновременно с вступлением отцепа на рельсовую цепь, так как после ее шунтирования перевод стрелки невозможен.
- максимальная скорость отцепа на заданном участке не должна превышать максимально допустимой скорости входа вагона на замедлитель (V <
Кзтах).
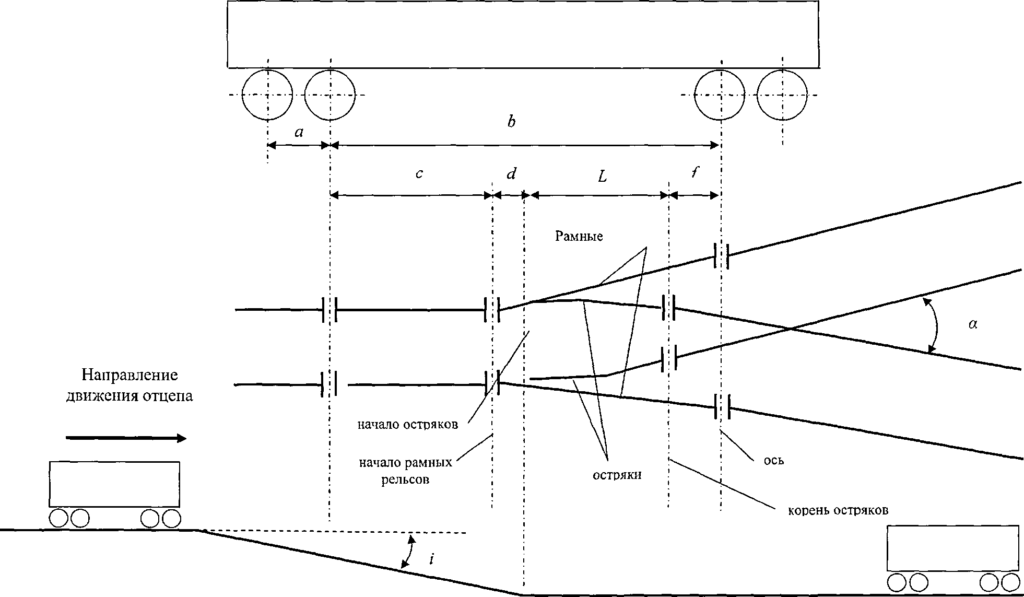
Рис 2.1. Расчетная схема для определения оптимального времени перевода стрелки
Соотношение (2.4) справедливо с учетом следующего условия — считаем достаточным для поддержания шунтового режима рельсовой цепи наличие в ее зоне одной колесной пары вагона .Очевидно, что максимальное время перевода стрелки является функцией скорости движения отцепа по заданному участку и длины последнего.
Так как от длины рельсовой цепи зависит минимальный интервал между отцепами на стрелке, т.е. производительность горки, длину защитного участка, удовлетворяющую неравенству (2.4), можно определить как минимальную, исходя из производительности горки.
Из анализа соотношения (2.7) следует, что при одной и той же максимально допустимой скорости движения по защитному участку, величина Тпс определяется параметрами конструкции расчетного вагона (базой — Ь) и стрелки (длиной остряков — Ь и расстоянием — /). Величина максимально допустимой скорости движения отцепа по защитному участку, согласно допущению 4, будет равна Упт = Гзпцх. Причем, это утверждение справедливо, если максимально допустимая скорость входа отцепа на замедлитель Узтлх не превышает максимально допустимой скорости движения по стрелочному переводу Гстах.
Исходя из указанных условий, время срабатывания быстродействующего стрелочного привода, установленного на стрелке марки Р50 М1/6 при максимальной скорости движения отцепа по стрелке 25 км/ч (6,9 м/с) не должно превышать: 0,586с, (2.8)
Если считать длину защитного участка заданной и равной 6м, то соотношение для нахождения допустимого времени срабатывания быстродействующего стрелочного электропривода привода определяется следующим соотношением.
Таким образом, время срабатывания быстродействующего стрелочного электропривода для горки (спускной части) не должно превышать 0,6 с. При меньшей скорости движения отцепа допускаемое время срабатывания привода можно увеличить, пересчитав его по приведенным формулам.
Определим зависимость времени перевода стрелки Гтах, как функцию, зависящую от величины уклона i (Гтах = f(i)). Известными величинами считаем длину защитного участка 13 и скорость отцепа в конце защитного участкаVK, равную максимальной скорости движения по стрелочному переводу VK = Fmax.
Уравнение скорости отцепа в конце защитного участка имеет следующий вид:
Vk=VH+a0-t
Результаты расчета времени перевода стрелки (с учетом времени автовозврата) в зависимости от уклона и скорости отцепа приведены в таблице 2.1. Сопротивление движению отцепа принимаем равным нулю (м> =0 — наихудший случай). Величина уклона / задавалась в пределах, принятых для отечественных горок.
На рисунке 2.2 представлена динамика изменения времени перевода стрелки в зависимости от скорости отцепа на защитном участке без учета времени срабатывания аппаратуры.
| Время перевода стрелки, Т | ПО С | |||||||||
| 1 | 5 | 10 | 15 | 20 | 25 | 30 | 35 | 40 | 45 | 50 |
| °/оо | 0% | °/оо | 0% | 0% | 0% | °/оо | 0% | 0% | 0% | |
| 0 км/ч | 7,822 | 5,495 | 4,463 | 3,849 | 3,429 | 3,119 | 2,879 | 2,685 | 2,524 | 2,388 |
| 1 км/ч | 5,269 | 4,133 | 3,53 | 3,137 | 2,853 | 2,636 | 2,461 | 2,318 | 2,196 | 2,092 |
| 2 км/ч | 3,71 | 3,163 | 2,818 | 2,572 | 2,384 | 2,233 | 2,109 | 2,004 | 1,914 | 1,835 |
| 3 км/ч | 2,953 | 2,586 | 2,347 | 2,166 | 2,024 | 1,932 | 1,827 | 1,735 | 1,658 | 1,613 |
| 4 км/ч | 2,34 | 2,154 | 1,989 | 1,859 | 1,797 | 1,703 | 1,624 | 1,534 | 1,498 | 1,452 |
| 5 км/ч | 1,893 | 1,781 | 1,685 | 1,61 | 1,545 | 1,488 | 1,438 | 1,393 | 1,352 | 1,315 |
| 6 км/ч | 1,633 | 1,558 | 1,492 | 1,423 | 1,385 | 1,337 | 1,302 | 1,262 | 1,227 | 1,191 |
| 7 км/ч | 1,396 | 1,346 | 1,301 | 1,262 | 1,226 | 1,193 | 1,163 | 1,136 | 1,11 | 1,087 |
| 8 км/ч | 1,201 | 1,167 | 1,136 | 1,107 | 1,081 | 1,057 | 1,035 | 1,014 | 0,995 | 0,977 |
| 9 км/ч | 1,049 | 1,025 | 1,003 | 0,982 | 0,963 | 0,945 | 0,928 | 0,912 | 0,897 | 0,882 |
| 10 км/ч | 0,945 | 0,926 | 0,908 | 0,891 | 0,875 | 0,861 | 0,845 | 0,832 | 0,819 | 0,801 |
| 11 км/ч | 0,86 | 0,845 | 0,832 | 0,819 | 0,806 | 0,795 | 0,784 | 0,773 | 0,763 | 0,753 |
| 12 км/ч | 0,772 | 0,761 | 0,751 | 0,741 | 0,731 | 0,722 | 0,713 | 0,705 | 0,697 | 0,689 |
| 13 км/ч | 0,699 | 0,691 | 0,683 | 0,675 | 0,667 | 0,66 | 0,653 | 0,646 | 0,639 | 0,633 |
| 14 км/ч | 0,657 | 0,649 | 0,642 | 0,636 | 0,629 | 0,623 | 0,616 | 0,61 | 0,605 | 0,599 |
| 15 км/ч | 0,601 | 0,595 | 0,589 | 0,583 | 0,578 | 0,573 | 0,568 | 0,563 | 0,558 | 0,553 |
| 16 км/ч | 0,552 | 0,547 | 0,542 | 0,538 | 0,533 | 0,529 | 0,525 | 0,521 | 0,517 | 0,513 |
| 17 км/ч | 0,509 | 0,505 | 0,501 | 0,498 | 0,494 | 0,49 | 0,487 | 0,483 | 0,48 | 0,477 |
| 18 км/ч | 0,472 | 0,468 | 0,465 | 0,462 | 0,459 | 0,456 | 0,453 | 0,45 | 0,447 | 0,444 |
| 19 км/ч | 0,449 | 0,446 | 0,443 | 0,44 | 0,437 | 0,435 | 0,432 | 0,429 | 0,427 | 0,424 |
| 20 км/ч | 0,418 | 0,415 | 0,413 | 0,411 | 0,408 | 0,406 | 0,404 | 0,401 | 0,399 | 0,397 |
| 21 км/ч | 0,39 | 0,388 | 0,386 | 0,384 | 0,382 | 0,38 | 0,378 | 0,376 | 0,374 | 0,372 |
| 22 км/ч | 0,365 | 0,363 | 0,361 | 0,359 | 0,358 | 0,356 | 0,354 | 0,353 | 0,351 | 0,349 |
| 23 км/ч | 0,349 | 0,348 | 0,346 | 0,345 | 0,343 | 0,341 | 0,34 | 0,338 | 0,337 | 0,335 |
| 24 км/ч | 0,328 | 0,327 | 0,325 | 0,324 | 0,322 | 0,321 | 0,32 | 0,318 | 0,317 | 0,316 |
| 25 км/ч | 0,308 | 0,307 | 0,306 | 0,305 | 0,303 | 0,302 | 0,301 | 0,3 | 0,299 | 0,297 |
Из анализа полученных зависимостей Тпста=/(Б) можно сделать вывод:
- время перевода Гистах в диапазоне скоростей 12-^-25 км/ч меняется незначительно и практически не зависит от начальной скорости отцепа ¥и и уклона участка /.
- максимальная эффективность работы горки сортировочной станции, оборудованной быстродействующим стрелочным электроприводом, достигается при движении отцепов со скоростями в диапазоне 14-^18 км/ч;
- полученные значения соответствует скатыванию четырехосных отцепов. Для растущего числа восьмиосных вагонов целесообразно увеличение предстрелочного участка и снижение начальной скорости отцепа, либо применение других методов роспуска.
Величина Тпст[п, рассчитанная по формуле (2.8), является минимальной,
что определяет максимально допустимое время перевода стрелки в наиболее «тяжелом» случае.
Для нахождения величины Г„стах следует определить базу расчетного вагона. Очевидно, что в качестве расчетного следовало бы принять вагон с наибольшей базой («длинный» вагон) [59]. В этом случае рельсовая цепь стрелки по длине будет также наибольшей, что, как указано выше, приводит к снижению производительности горки. При этом следует учитывать количественную сторону, т.е. число длиннобазных вагонов в вагонном парке, т.к. они в настоящее время составляют незначительный процент сортируемых вагонов. Следовательно, принятие в качестве расчетного — длиннобазного вагона привело бы к значительным экономическим потерям. Очевидно, для спуска с горки незначительного числа длиннобазных вагонов необходимо предусмотреть специальные меры.
На основании изложенного, Г„стах определяется из расчета характеристик четырехосных вагонов с длиной базы 11,2 м [60].
(2.13) Таким образом, суммарное время срабатывания быстродействующего стрелочного привода и устройств управления стрелкой составляет:
Тпс = Тпстах + ((сг +/„,) = 0,62 + (ОД 5 + 0,1) = 0,87с .
В указанную величину входит время срабатывания блока управления стрелочным приводом и время фиксации вступления отцепа в пределы защитного участка, которые в сумме не должны превышать 0,25 с.
Следовательно, время срабатывания быстродействующего стрелочного электропривода должно находиться в пределах 0,5 <Гпстах< 0,6 секунд.
Решение задачи оптимизации времени срабатывания быстродействующего стрелочного привода (БСП) наиболее удобно проводить, используя теорию оптимального управления [61]. С учетом того, что время перевода стрелки зависит как от параметров органа управления, конструкции привода, так и от закона управления БСП. Это требует определения вида закона управления приводом и провести его анализ. Для решения задачи обеспечения максимального быстродействия БСП используем принцип максимума Л.С. Понтрягина [62].
В фазовом пространстве X переменных X], …, х п задано начальное х0 и конечное XI положение объекта. В пространстве управлений м/, …. и
г задано некоторое множество I/, ограничивающее область определения допустимых управлений. Под допустимыми подразумеваются управления в виде кусочно- непрерывных функций и=и(1). Если под действием управлений и({), начиная с момента to, объект из положения х0=х({0)
переходит в положение Х1=Х^1) так, что ^ <7 <7;, то время перехода составляет Т= ^ — Задача заключается в том, чтобы найти такую вектор-функцию и(0,которая обеспечивала бы перевод объекта из одного в другое положение за Ттщ, т.е. минимизирует.
В конечный момент времени ti должно выполняться следующее условие:
H(iKt),x(t),u(t))>0. (2.20)
В оптимальном процессе функция H(y(t),x(t),u(t)) будет постоянной, т. е.
H(tKt),x(t),u(t)) = const. (2.21)
Применительно к стрелочным электроприводам, в качестве фазовых координат можно рассматривать углы поворота ф и скорости со вращения валов электродвигателей, а в качестве компонент управлений — их токи /. Тогда уравнение движения электропривода имеет вид
М-М=1—, (2.22)
Обозначив X/ = х2 = (р, х3 — со, и -), получим систему дифференциальных уравнений БСП в следующей форме.
Из соотношения (2.29) следует, что оптимальное управление иф представляет собой кусочно-постоянную функцию, принимающую значения и — +1. Она может сменить знак только один раз (рис.2.3).
При оптимальном управлении процесс срабатывания стрелочного привода состоит из участков разгона (ОА1) и торможения (А^;), т.е. при отсутствии ограничений процесс целиком протекает в неустановившемся режиме. Скорость привода (х3) возрастает и убывает по линейному закону. Оптимальное управление приводом (практически управляют напряжением, а не током) должно поддерживаться на максимальном уровне, т. е. равным положительному значению (и = +1) до момента переключения (12) и затем отрицательному (и = -1) — до конца срабатывания
Возможен и другой способ реализации оптимального управления, связанный с конструктивной фиксацией момента начала торможения электропривода. При фиксации момента начала торможения электропривода (рис.2.4) в точке А1 (и=1, /и=1), при значениях и, ц, меньших или больших 1, привод либо не дойдет до крайнего положения, что недопустимо, либо будет стремиться проскочить его. Практически, в последнем случае прижатый остряк стрелки будет совершать «отжим» рамного рельса. Однако недоход привода может быть полностью механизмом гашения скорости исключен, если фиксировать момент начала торможения электропривода в точке А2, соответствующей полному ходу стрелки. «Отжим» остряков стрелочным приводом, вызывающее быстрое расстройство нормальной работы стрелочного перевода, может быть устранено введением отсечки движения в передаточном механизме БСП. Отсечка движения при одновременном выключении управления (и=0) может быть достигнута различными способами. Во избежание появления недопустимых динамических перегрузок в элементах привода при его стопорении запасенная при разгоне кинетическая энергия должна быть погашена торможением.
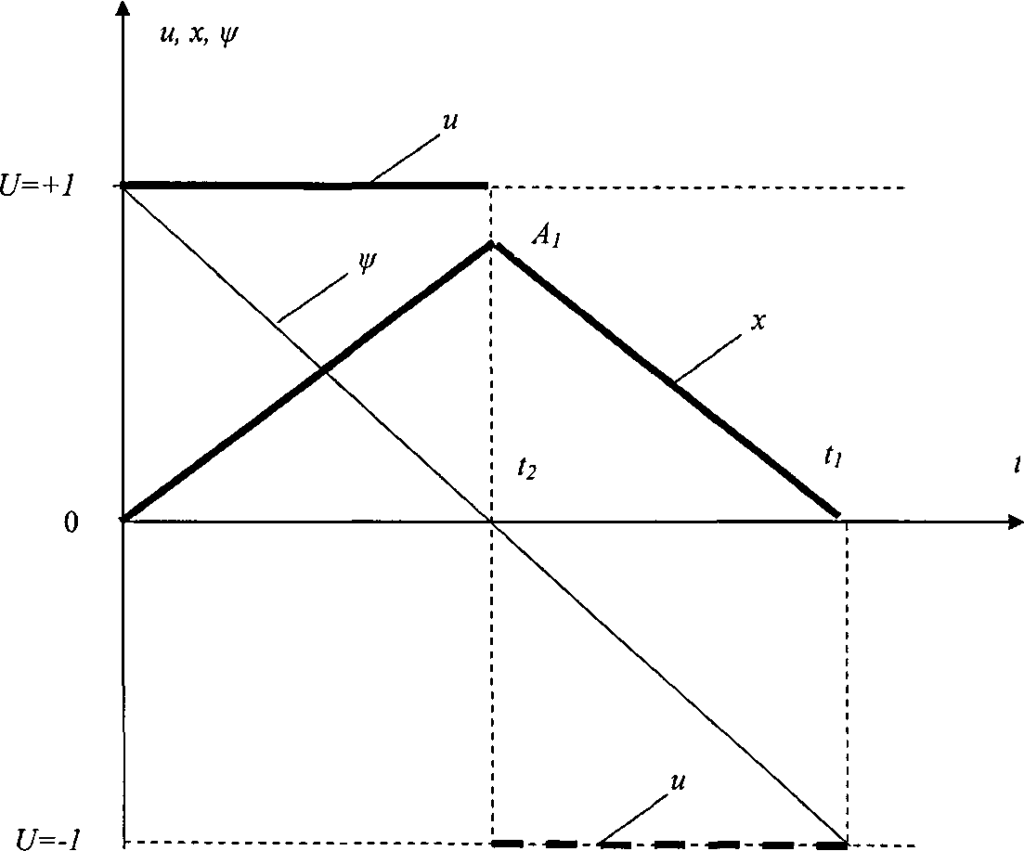
Рис. 2.3 График процесса срабатывания стрелочного привода
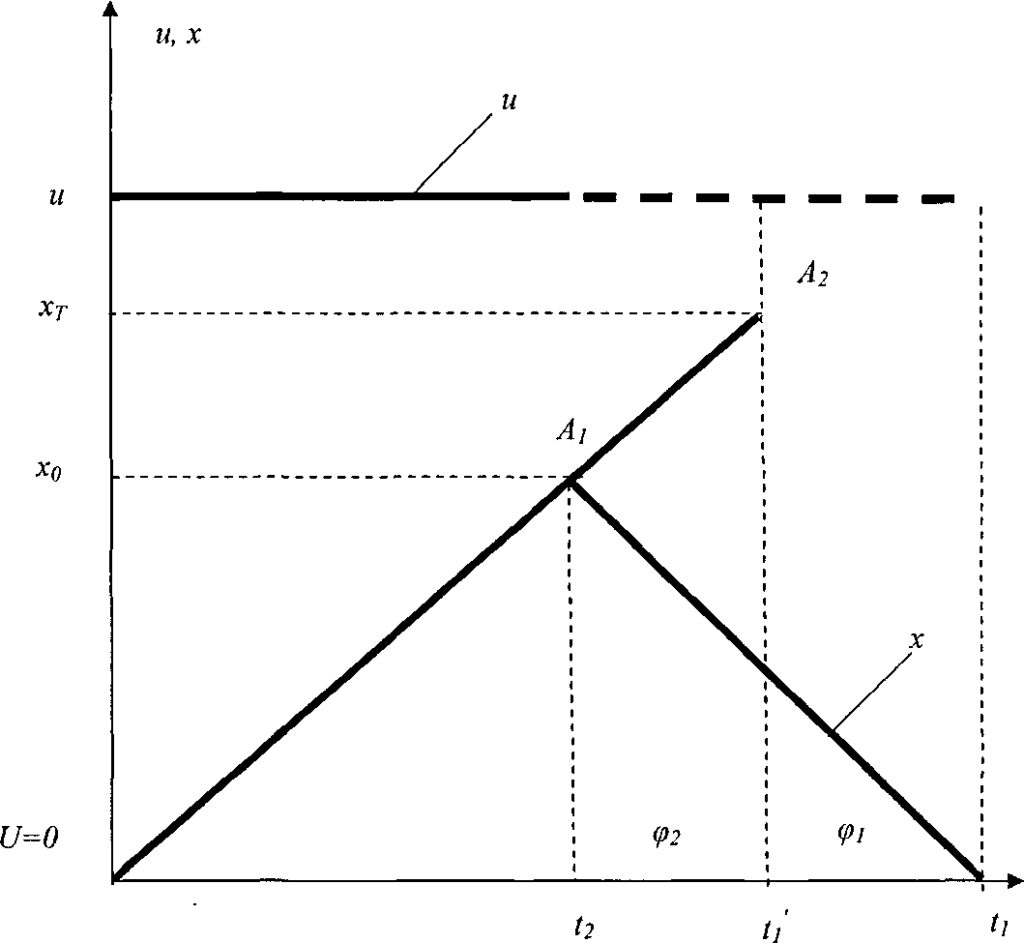
Рис.2.4. График процесса срабатывания стрелочного привода, оснащенного
Таким образом, рассмотренный вариант управления стрелочным электроприводом имеет три характерных этапа:
- управление и-+1 на участке разгона;
- отсечка движения стрелки;
- механическое (электромеханическое) торможение движущихся частей привода.
Реализация оптимального управления электроприводом за счет введения в конструкцию БСП механизма гашения скорости в конце перевода, позволяет (рис.2.4, зона повысить быстродействие привода Кроме того, такое устройство обеспечит гашение запасенной энергии движущихся частей стрелки.
Исследование работы БСП в режиме перевода стрелки. Определение необходимого тягового усилия на шибере БСП
Другим важнейшим параметром, характеризующим работу быстродействующего стрелочного привода, является номинальное тяговое усилие привода. Оно может быть установлено, если определен диапазон усилий перевода стрелок.
При переводе стрелки (рис.2.5) работа привода затрачивается на перемещение остряков 5 и 6, связной тяги 1, рабочей тяги 3, контрольных тяг 2 и 4,
стрелочной гарнитуры и деталей крепления. На сортировочных горках стрелки применяются исключительно с накладочным корневым креплением [63-45]. Следовательно, усилие перевода затрачивается лишь на преодоление силы трения перемещаемых частей стрелки о подкладки 7, сопротивления в шарнирах корней остряков и сил инерции подвижных частей стрелки.
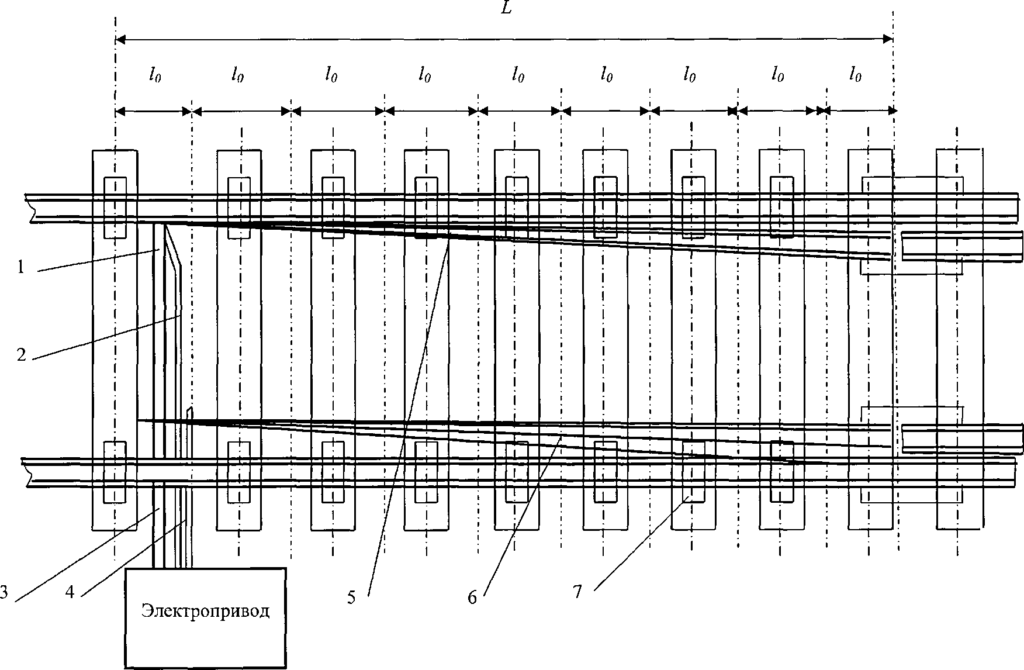
Рис.2.5. Расчетная схема для определения усилия перевода

Фактический вес остряка от корня к острию уменьшается за счет наличия строжки. Для горочной стрелки из рельсов марки 1/6 Р50 вес одного погонного сантиметра остряка от корня к острию уменьшается на 45%. При расчете необходимо учитывать неравномерное по длине остряка распределение веса стрелочной гарнитуры и других перемещаемых деталей.
Из выше изложенного вытекает необходимость разработки методики определения усилия перевода стрелок с накладочным корневым креплением.
Усилие перевода стрелки затрачивается на преодоление трения перемещаемых частей о подушки и сопротивления в шарнирах. Усилие, необходимое для преодоления сил трения перемещаемых частей стрелки, определяется силой трения, возникающей при их движении. Ее можно найти таким образом.
Представим стрелку эквивалентной схемой остряка, приведенной на рисунке 2.6. Разделим остряк на п равных элементов длиной 1к по всей длине (п > 8-н10) и обозначим через q^, д2 …., вес каждого элемента. Веса элементов будут различны, как за счет разницы сечения, так и за счет наличия или отсутствия связных тяг стрелочной гарнитуры и других перемещаемых частей в пределах элементов.

Момент инерции остряков стрелки относительно корня:
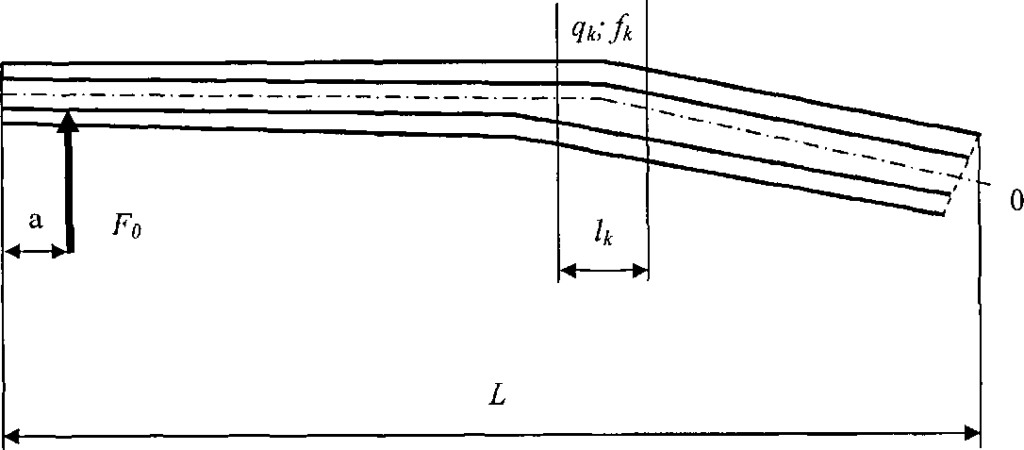
Рис.2.6. Эквивалентная схема расчета момента инерции остряка
Приведение момента инерции стрелки ^ к главному валу электропривода производится на основе равенства кинетической энергии заменяемой системы (стрелки) и приведенной.
Усилие преодоления сопротивления в шарнирах определяется экспериментальными измерениям. Коэффициент, учитывающий влияние сил трения в шарнирах, принимаем равным 1,1 [33].
Таким образом, уточненное усилие перевода стрелки с шкворневым или вкладышно-накладочным креплением, приложенное на расстоянии (.Ъ-а) от корня.
Как следует из формулы (2.42), перевод стрелки зависит от веса перемещаемых частей, конструкции корневого крепления, длины остряков, места закрепления переводных тяг и коэффициента трения остряков о подушки. Все указанные величины, за исключением последней, являются вполне определимыми. Величина коэффициента трения, как показывает экспериментальные исследования, не превышает 0,2 и зависит от состояния стрелки, качества смазки стрелочных подушек, чистоты обработки их поверхности, а также подошв остряков и других факторов. При хорошем содержании горочных стрелок, величина коэффициента трения снижается до 0,10+0,15.
В эксплуатации на сортировочных горках применяются симметричные стрелочные переводы из рельсов Р50 и Р65 с крестовиной марки 1/6 и имеется небольшое число (около 7%) переводов из тех же типов рельсов, но с крестовиной марки 1/9. Перспективным является применение переводов из рельсов типа Р65 с крестовиной марки 1/6, т.е. коротких (легких) стрелок, что позволяет уменьшить длину спускаемой части.
В таблице 2.2 приведены результаты расчета усилия перевода горочных стрелок с учетом состояния стрелочного перевода (силы трения).
| Тип перевода | Марка стрелки | Длина остряка, Ь, м | Усилие перевода Рпер1 Н | ||
| ^=0,3 | £ф 0,2 | £гр=0,1 | |||
| Р65 | 1/9 | 7 | 1490 | 1170 | 755 |
| Р50 | 1/9 | 6,5 | 840 | 630 | 420 |
| Р65 | 1/6 | 5,4 | 745 | 558 | 372 |
| Р50 | 1/6 | 4,3 | 540 | 405 | 270 |
Как следует из анализа таблицы 2.2, величина усилия перевода стрелок одной и той же марки может колебаться в значительных пределах, достигая значения максимальной величины 1490 Н на стрелочном переводе марки 1/9 из рельсов Р65.
Исследование динамики движения остряков в конце перевода стрелки, оборудованной БСП
При переводе стрелки, остряки осуществляют перемещение из одного крайнего положения в другое на величину хода шибера со скоростью перевода V.
В процессе перевода стрелки энергия электропривода, затрачивается на работу по приведению остряков в движение в начале перевода и поддержанию движения в процессе перевода с необходимой скоростью (преодоление сил сопротивления движению остряков).
Приведенный момент инерции Зпр является величиной постоянной для конкретной стрелки и не зависит от угла (р, т.е. переменной является угловая скорость со. Зная закон изменения угловой скорости со, можно описать энергетический характер движения остряков (рис.2.7).
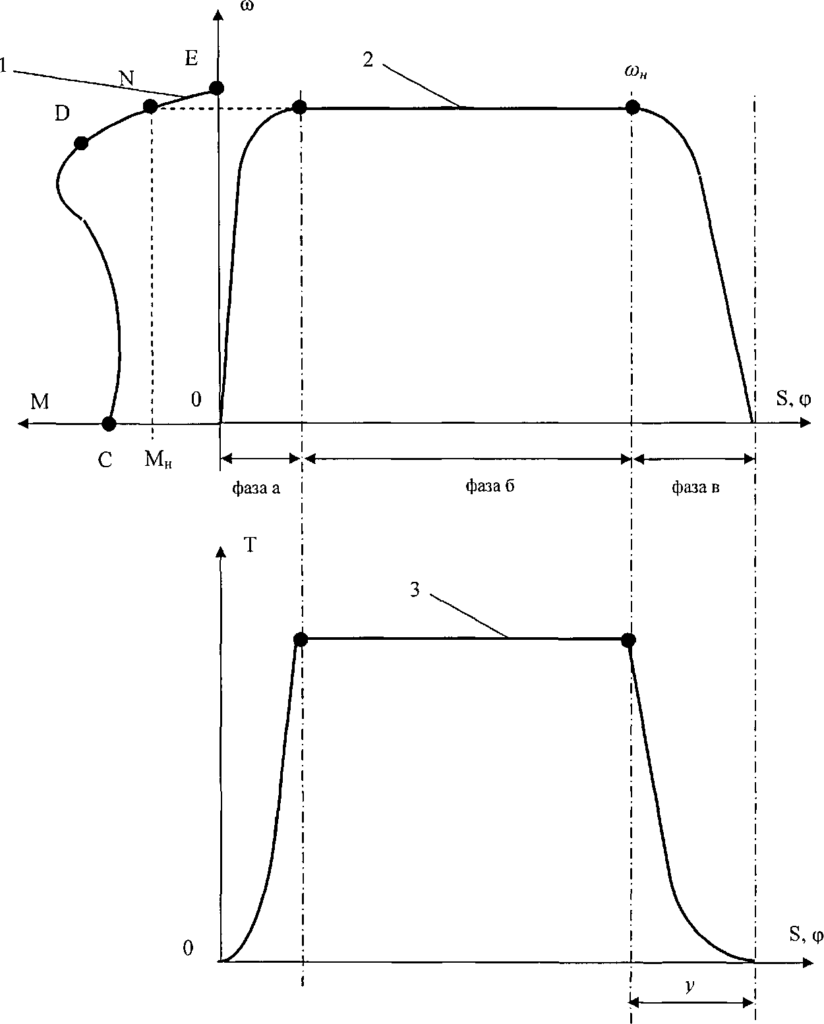
Анализ полученных зависимостей позволяет утверждать, что весь процесс перевода остряков стрелки, с точки зрения изменения кинетической энергии, делится на три фазы:
- разгон — приведение остряков из состояния покоя в состояние равномерного движения (фаза а);
- равномерное движение со скоростью со — установившийся режим (фаза б);
- торможение — приведение остряков стрелки из состояния движения со скоростью со в состояние покоя, си = О (фаза в).
Разгон и торможение остряков относится к неустановившемуся режиму работы стрелочного электропривода.
Фаза а (рис.2.7) определяется механической характеристикой силового механизма. Например, электропривод с асинхронным двигателем переменного тока имеет механическую характеристику, показанную на рисунке 2.7а, кр.1, повторяющую механическую характеристику электродвигателя в начальной ее стадии (участок СБ1чГ).
Вторая фаза движения остряков (фаза б) — равномерное движение с установившейся скоростью со. Равномерным это движение можно назвать с достаточной точностью по условию рабочей характеристики силового механизма.
Частота вращения ротора асинхронного электродвигателя с коротко- замкнутым ротором представляет собой жесткую характеристику (рис.2.7а, кр.1, участок ЭЕ), т.е., при достаточно значительном изменении нагрузки, его угловая скорость со изменяется незначительно и, в пределах номинальных нагрузок, практически остается постоянной.
Третья фаза — торможение (фаза в) представляет в режиме перевода остряка (шибера) наибольший интерес, т.к. именно в этом конечном положении шибера (остряка) происходят динамические процессы, влияющие на надежность работы стрелочного перевода и гарнитуры.
Согласно теореме об изменении кинетической энергии в системе: Тт-Тт= (2.48)
Учитывая тот факт, что механическая система (остряки, гарнитура) является неизменяемой (Тнач = 0) соотношение (2.41) приобретает следующий вид.
Суммарная работа внешних сил включает в себя работу по преодолению сил трения и работу по переводу остряков стрелки.
Анализ соотношения (2.55) показывает, что в момент окончания рабочего хода шибера его линейная скорость V имеет максимальное значение, процесс торможения инерционной системы сопровождается только силовым фактором, которым является приведенный момент Мпр. Исследуем процессы, происходящие в электроприводе СПГБ при торможении движущихся остряков. Поступательное движение шибера осуществляется путем реечной передачи от шестерни главного вала на рейку, которая выполнена заодно с шибером. Крайние зубья шестерни и рейки имеют специальную форму и являются запирающими зубьями в крайних положениях шибера.
Анализ данной конструкции с энергетической точки зрения показывает, что в момент выработки шибером электропривода своего рабочего хода его линейная скорость V или угловая скорость остряков со имеют максимальное установившееся значение (рис.2.7,а, кр.2). Остряк подходит к рамному рельсу с установившейся скоростью V. Запасенная энергия движущихся масс, как видно из графика,

Энергия движущихся масс при ударе переходит в потенциальную энергию рамного рельса и деформирующихся движущихся частей (рис.2.7,а, кр.З), отжимая первый на величину у. Последствиями удара остряка о рамный рельс являются ослабление крепления электропривода, рамных рельсов, что в конечном итоге, снижает их надежность в работе и безопасность движения.
Рассмотрим стрелочный перевод, как динамическую систему. Считаем, что рамный рельс представляет собой упругую балку (рис.2.8) с защемленным концом (подошва рельса с определенной жесткостью). В конце перевода остряков, запасенная кинетическая энергия движущихся остряков преобразуется в удар, с последующими колебаниями рамного рельса и остряка, которые затухают со временем.
На рисунке 2.9 представлена математическая модель поведения системы V и ТЛ «остряк — рамный рельс» при их взаимодействии. В рисунке использованы следующие обозначения: Руд— сила удара остряка об рамный рельс в конце перевода стрелки; — эквивалентный демпфер; — эквивалентная пружина; у — угол отклонения рамного рельса от первоначального положения; у — смещение рамного рельса от первоначального положения.
Рис.2.8. Эквивалентная схема замещения для расчета колебаний в системе «остряк — рамный рельс»
При анализе процесса свободных колебаний, рассматриваемой системы, необходимо учитывать два условия [66].
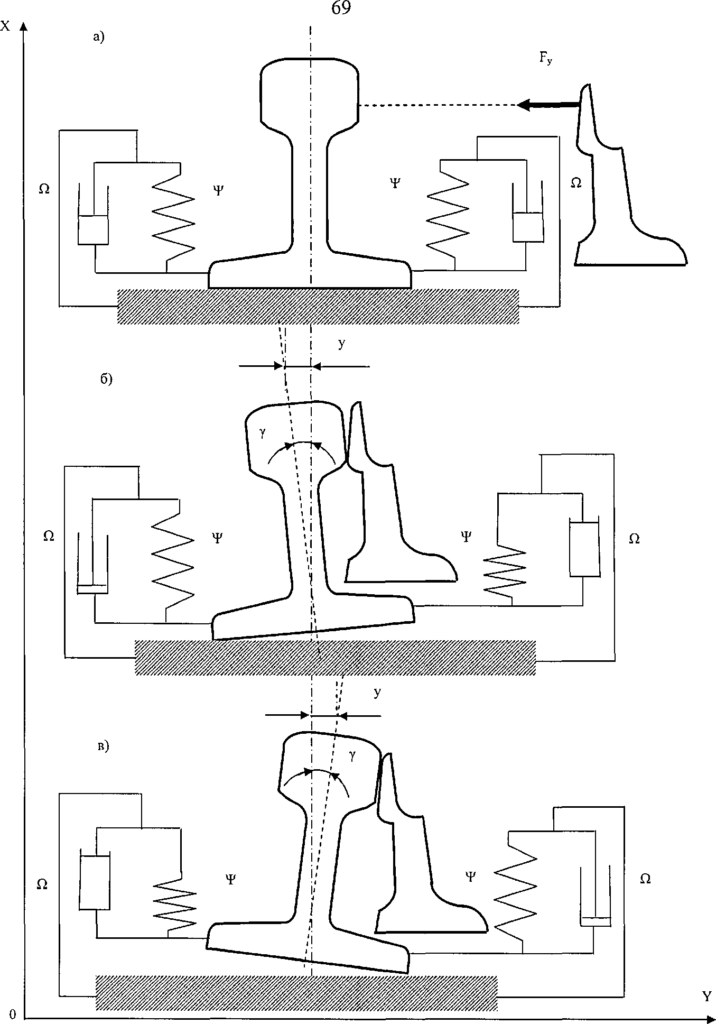
Рис.2.9. Математическая модель колебаний рамного рельса после взаимодействия с остряком в конце перевода стрелки
| № | Тип рельсов | Тип шпал | Боковая жесткость, |
| п/п | 5рр, кг/мм | ||
| 1 | Р 50 | деревянные | 1600 |
| 2 | Р 50 | железобетонные | 1800 |
| 3 | Р 65 | деревянные | 1800 |
| 4 | Р 65 | железобетонные | 2000 |
Считаем, что балка изгибалась под действием силы, приложенной только к концу балки с достаточно малой и постоянной скоростью. Тогда положение точек центров масс всей балки в начале свободных колебаний после снятия приложенной силы Г о определяется уравнением.
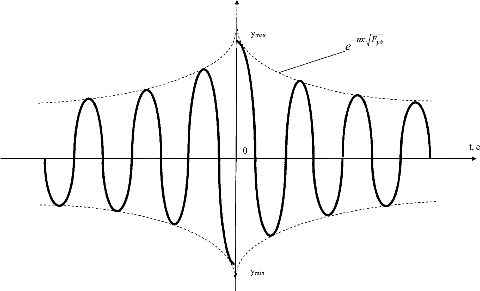
Рис.2.10. Процесс затухания колебаний рамного рельса после взаимодействия с остряком в конце перевода
| Боковая жесткость | Электроприводы ЭЦ | Электроприводы ГАЦ | ||||
| Тип стрелочного | Тип шпал | рамного рельса | Скорость подхода | Величина | Скорость подхода | Величина |
| перевода | 8рр, г/мм | остряка к рамному | на смещения, | остряка к рамному | смещения, | |
| рельсу, м/с | у, мм | рельсу, м/с | у, мм | |||
| Р50 М 1/6 | дерев. | 1600 | 0,039 | 1,367 | 0,396 | 3,511 |
| Р50 М 1/9 | дерев. | 1600 | 0,039 | 1,453 | 0,396 | 3,674 |
| Р50 М 1/6 | жбт. | 1800 | 0,039 | 1,231 | 0,396 | 3,246 |
| Р50 М 1/9 | жбт. | 1800 | 0,039 | 1,314 | 0,396 | 3,362 |
| Р65 М 1/6 | дерев. | 1800 | 0,039 | 1,685 | 0,396 | 4,168 |
| Р65 М 1/9 | дерев. | 1800 | 0,039 | 1,842 | 0,396 | 4,317 |
| Р65 М 1/6 | жбт. | 2000 | 0,039 | 1,508 | 0,396 | 3,825 |
| Р65 М 1/9 | жбт. | 2000 | 0,039 | 1,571 | 0,396 | 4,079 |
Проанализировав полученные результаты можно сделать следующие выводы:
- скорость подхода остряка к рамному рельсу быстродействующего горочного электропривода на порядок выше скорости подхода электропривода системы ЭЦ;
- величина колебаний рамного рельса у после взаимодействия с остряком находится в интервале, сопоставимом с величиной допустимого зазора между остряком и рамным рельсом;
- обязательным для горочных электроприводов должно быть наличие устройства гашения кинетической энергии движения остряков в конце перевода стрелки.
Иначе говоря, для того, чтобы остановить инерционную систему, необходимо приложить к ней определенное силовое воздействие.
Во всех серийных отечественных (кроме электроприводов серии ВСП) и в большинстве зарубежных стрелочных электроприводах (за исключением электрогидропривода фирмы «Ьогеш» Ь-910) третья фаза движения остряков (торможение) осуществляется без участия механики электропривода, т.е. скорость движения остряков остается неизменной до момента отключения электродвигателя (рис.2.7а, кр.2). Рассматривая процесс перевода остряков стрелки с энергетической точки зрения, можно утверждать, что работа по поглощению кинетической энергии в конце перевода стрелки происходит лишь за счет работы сил трения в кинематических парах: остряк — стрелочные подкладки, упругих сил рамного рельса и гарнитуры, без снижения ее электроприводом (рис.2.7а, кр.З). На практике это приводит к ударам остряка о рамный рельс, его отжиму и «отбою» остряков. В эксплуатации имелись случаи излома остряков. В стрелочных электроприводах серии СП кинетическая энергия остряка увеличивается за счет кинетической энергии вращающихся масс самого электропривода.
Приведенный выше анализ динамики движения шибера в конце перевода стрелки доказывает необходимость применения в конструкции быстродействующего стрелочного электропривода устройства для гашения запасенной энергии электропривода и стрелки.2.5 Определение сил, действующих в стрелочном переводе при проходе колесной пары по стрелке
Рассматривать режимы работы стрелочного привода необходимо с позиции взаимодействия всего комплекса стрелочного перевода, состоящего из:
- стрелочного перевода;
- стрелочной гарнитуры;
- электропривода;
- подвижного состава.
Для выполнения условий безопасности движения поездов каждый узел и элемент конструкции силовой цепи стрелочного перевода, должен обладать способностью создавать самому, воспринимать и выдерживать усилия, действующие при проходе подвижного состава. Поэтому необходимо определить критерии значений усилий, воздействующих и воспринимаемых элементами и узлами стрелочного перевода.
Основным условием при определении нормированных усилий должно быть выполнение условий безопасности движения поездов по стрелке с различными скоростями. Определяющим силовым фактором действующим в стрелочном переводе при проходе подвижного состава, является минимальная (максимальная) нагрузка на ось.
Усилие перевода остряков стрелки, с позиции обеспечения безопасности движения поездов, характеризуется выполнением трех условий:
- усилие перевода стрелки не должно приводить к упругой деформации рабочих тяг и отжиму рамного рельса. Это усилие составляет 12-ь15 кН [68].
- усилие перевода не должно приводить к упругой деформации остряков, принудительному прижатию их к рамному рельсу и замыканию шибера в случае попадания посторонних предметов между остряком и рамным рельсом на всем протяжении остряков, приводящей к сужению колеи более допустимой величины. Дополнительные упругие силы, возникающие в остряках при подходе к рамному рельсу, характеризуются: условиями работы, правильностью установки стрелки, точностью регулировки рабочей и соединительной тяг. В эксплуатации эти силы являются причиной отжима остряка. Можно с уверенностью сказать, что они в разной степени обязательно присутствуют при переводе стрелки.
Наличие посторонних предметов между остряком и рамным рельсом, неравномерное прилегание остряка к рамному рельсу по всей строжке остряка, прижатие остряка из-за увеличенных размеров соединительной или рабочей тяги и т.п. — все это приводит к увеличению усилия на шибере в конце перевода. Эта величина может достигать 1,5-г2,0 кратного увеличения усилия перевода. Однако такое увеличение усилия не снижает уровень безопасности прохождения подвижного состава по стрелке, т.к. увеличение усилия происходит за 2+3 мм до окончания перевода остряков, что является приемлемым.
- усилие перевода стрелки должно обеспечивать надежную работу стрелочных переводов и должно быть не менее 1100 Н и не более 4000 Н.
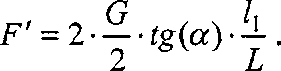
Таким образом, усилие перевода стрелки должно быть в пределах: ^=(0,01^0Д)-ат;п. (2.98)
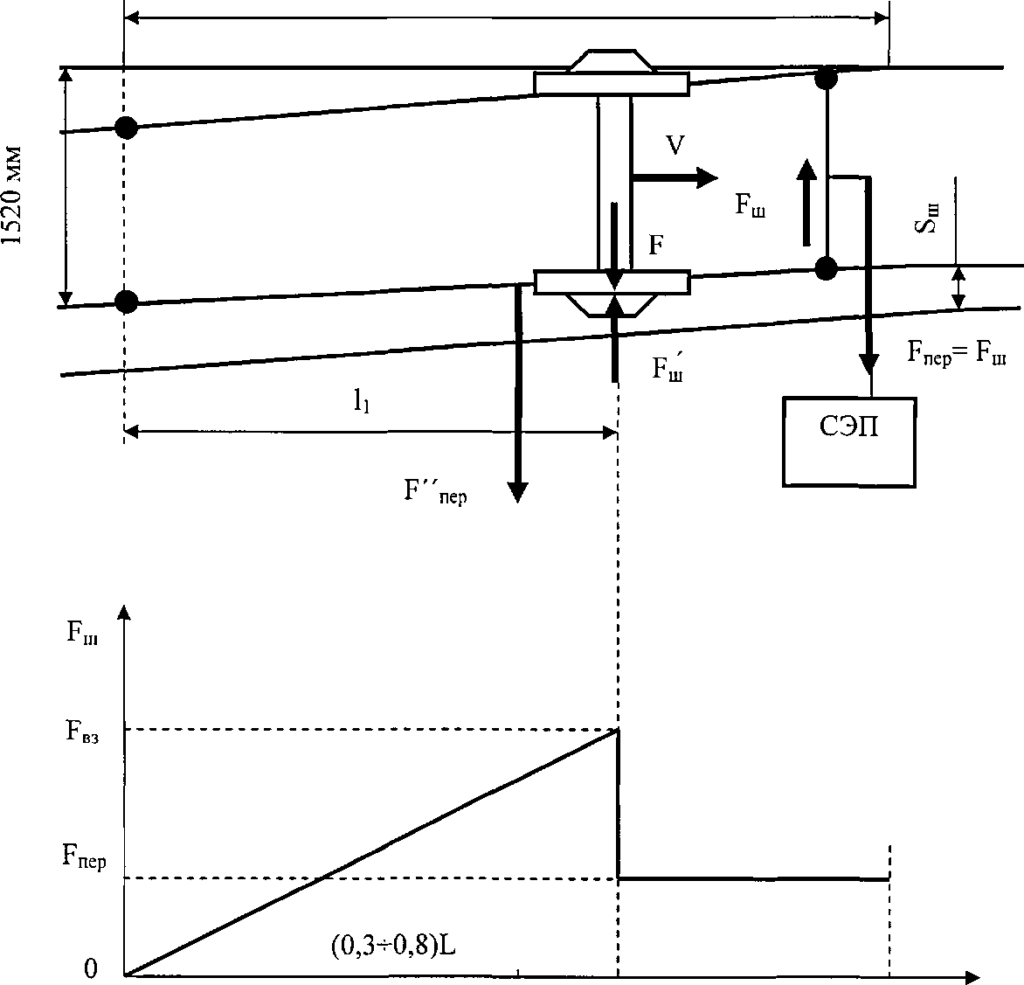
На рисунке 2.11 показана диаграмма усилия перевода стрелки для перевода остряков со шкворневой или вкладышно-накладной заделкой. В идеальном случае тяговая характеристика электропривода = / (8Ш) должна повторять эти кривые или быть на 25-ьЗО % выше ее.
При прохождении подвижного состава по стрелке, в рабочей тяге возникают усилия упругой деформации ¥упр. Для обеспечения надежной и безопасной работы стрелочного перевода эта деформация должна быть меньше 4 мм и находиться в зоне упругой деформации материала. Таким образом, значение усилия упругой деформации рабочей тяги Еупр находится в следующих пределах:
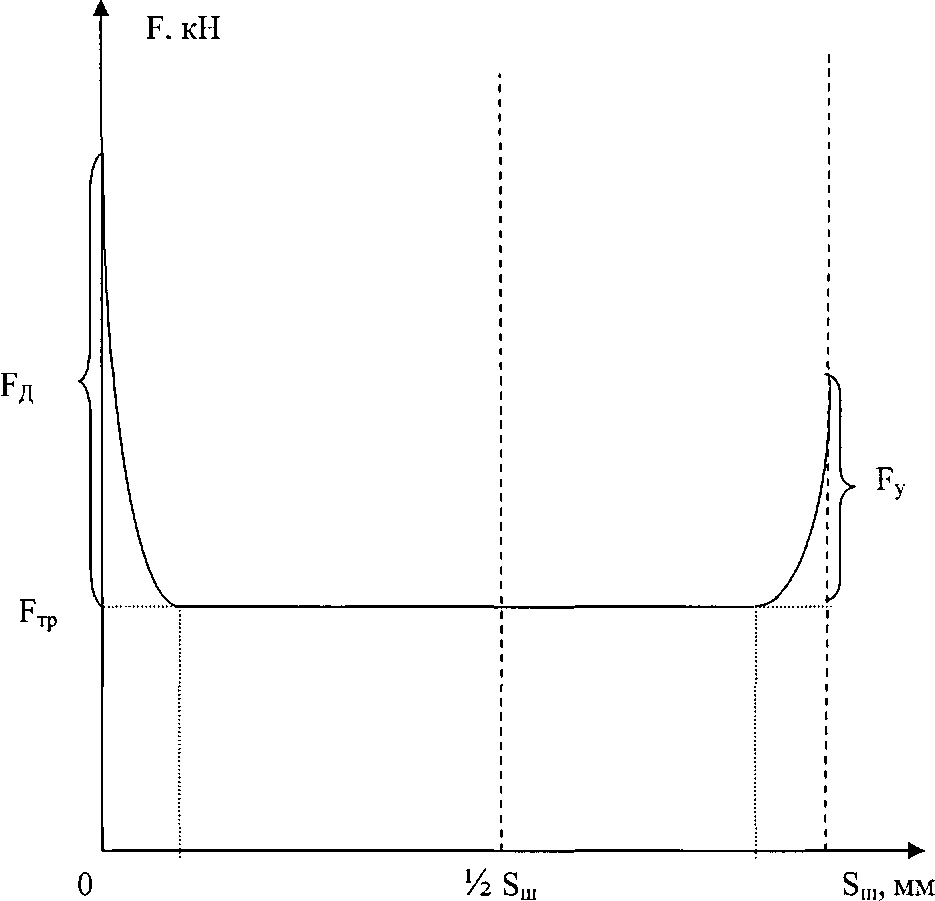
Рис.2.11. Диаграмма усилия перевода остряков горочной стрелки марки М1/6 и М1/9
При дальнейшем росте усилия на шибере, действие упругой деформации прекращается и наступает потеря несущей способности гарнитуры (в первую очередь — рабочих тяг). Наступает пластическая деформация. Это усилие составляет: при сжатии рабочей тяги Рнес=32 кН, а при растяжении Рнес — 76 кН [68]. Можно предположить, что такое расхождение объясняется не симметричной конструкцией рабочей тяги.
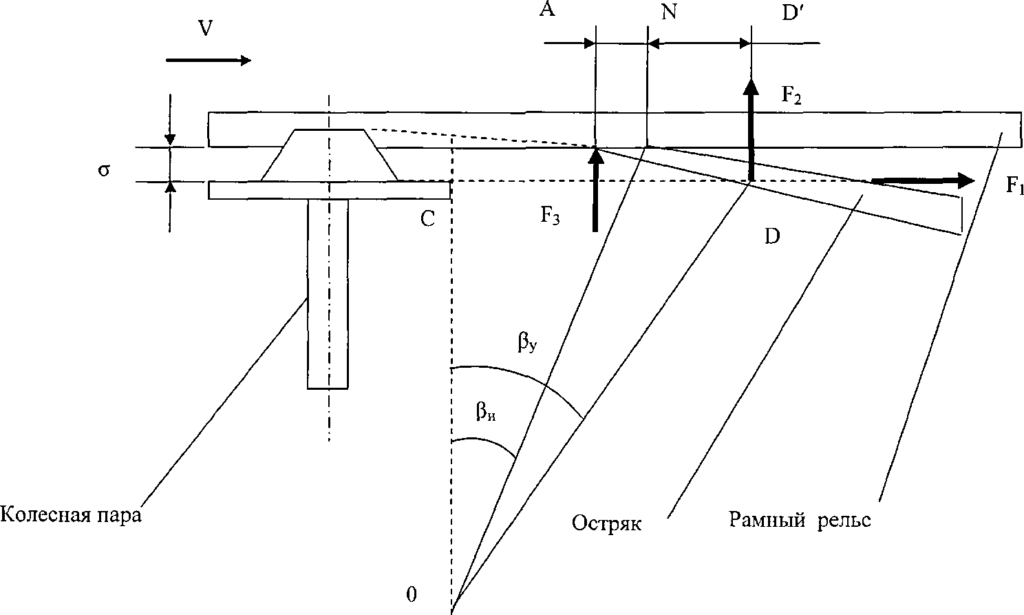
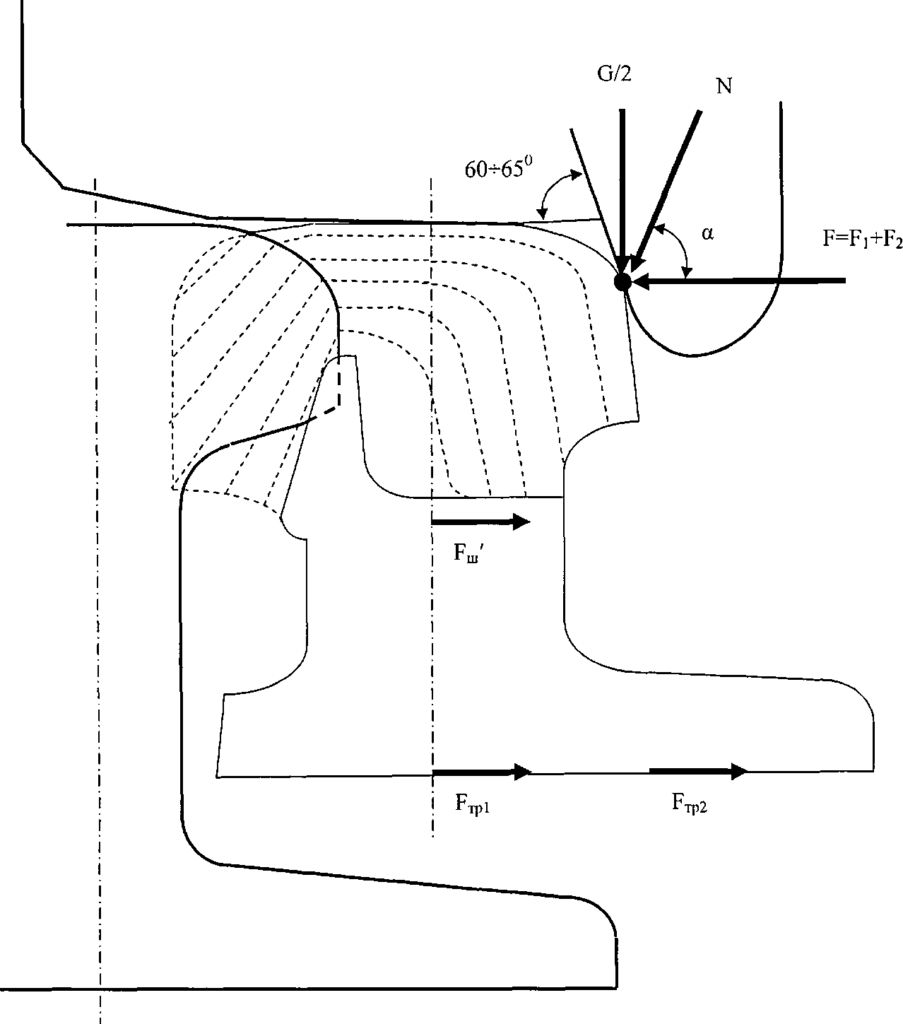
Для определения величины усилия, обеспечивающего гарантированное удержание прижатого остряка к рамному рельсу Езам, рассмотрим математическую модель, приведенную на рисунке 2.12. На стрелочных переводах прижатие остряка к рамному рельсу происходит под начальным углом Д„ который образуется при теоретическом пересечении рабочей грани рамного рельса с рабочей гранью остряка. Текущий угол, зависит от положения колеса при входе на стрелку и называется углом удара ¡Зг Сила Т7; — сила бокового удара гребня колеса об остряк, вызывает ответную реакцию — силу направленную на отжатие остряка от рамного рельса. Из расклада сил выведем уравнение для определения усилия замыкания (удержания) остряка.
Рис. 2.12. Математическая модель для определения величины отжима остряка от рамного рельса при прохождении по стрелочному переводу колесной пары
- А — точка приложения силы, удерживающей остряк;
- Б — точка удара колеса в остряк;
- I)’- проекция точки приложения силы Г2 на ось X;
- N — точка конец строжки остряка (крайняя точка касания остряка и рамного рельса);
- С — текущая координата соприкосновение остряка и колеса;
В результате вычислений получаем — усилие замыкания прижатого остряка к рамному рельсу варьируется в диапазоне Р3 = 6500+8000 Н.
(2.105) Усилия, возникающие при прохождении подвижного состава по стрелке и направленные на отжим прижатого остряка от рамного рельса, воспринимаются гарнитурой (рабочей тягой) и электроприводом (механизмом запирания шибера). Для обеспечения безопасности прохождения подвижного состава по стрелке усилие замыкания (прижатия) прижатого остряка должно быть гарантированной величиной с определенным запасом (2,5+3,5). Значительное увеличение этой величины для быстродействующего стрелочного электропривода нецелесообразно, т.к. это с одной стороны приведет к увеличению габаритных размеров и металлоемкости электропривода, а с другой стороны не обеспечит надежного замыкания остряков, т.к. эти значения выходят за пределы значений несущей способности гарнитуры.
Важным критерием безопасности движения поезда является коэффициент устойчивости выкатывания колеса на рельс при прохождении стрелочного перевода, который определяется формулой:
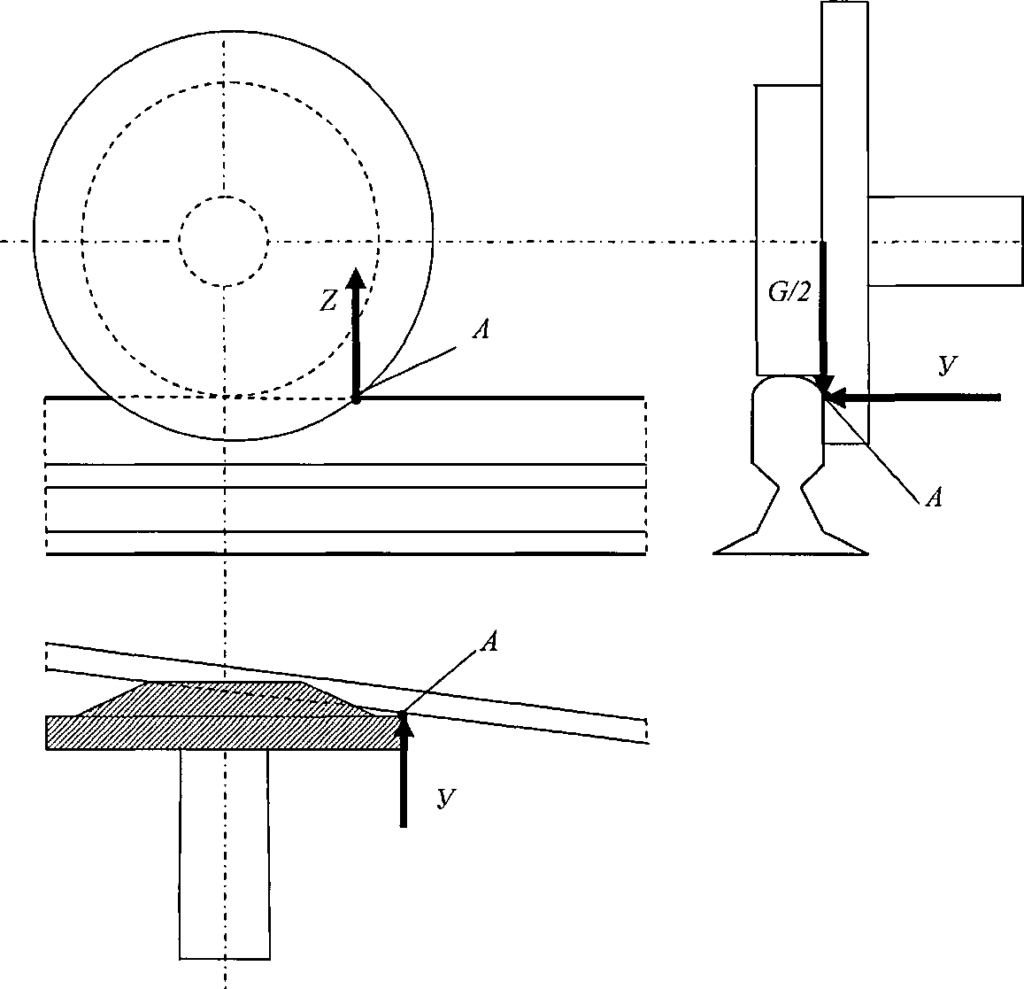
Значение коэффициента устойчивости всегда должно быть больше 1, а с учетом воздействия внешних факторов он должен составлять ку (2,5-З,0). Физически коэффициент устойчивости показывает во сколько раз нагрузка колеса 0/2 больше силы стремящейся выдавить колесо на поверхность катания рельса (рис.2.13). Выкатывание колеса на рельс, с последующим сходом подвижного состава, происходит в тех случаях, когда сила бокового прижатия гребня к рельсу У, а следовательно и сила трения гребня колеса о рельс в точке контакта реборды колеса и рельса А возрастает настолько, что колесо начинает подниматься над поверхностью головки рельса, опираясь на острожку остряка, а вертикальное давление колеса 0/2 не может преодолеть силу трения и прижать колесо обратно к поверхности катания головки рельса. Выражение, характеризующее устойчивость колесной пары от выдавливания из колеи, имеет вид.
Таким образом, при разработке конструкции стрелочного привода, гарнитуры, элементов сопряжения, жесткости и прочности отдельных узлов и деталей силовой цепи для легких стрелочных переводов ГАЦ, целесообразно руководствоваться данными таблицы 2.6, соблюдая правила селективности в зависимости от назначения привода.
Рис. 2.13. Модель взаимодействия колеса и рамного рельса при выдавливания колесной пары из колеи
| № | Функциональное значение усилия | Условные | Числовые значения |
| п/п | обозначения | величины усилия | |
| 1 | Усилие перевода стрелки | /г 1 пер | (0,01+0,1) • Gmin |
| 2 | Усилие упругой деформации рабочих тяг | р * УПР | С0,2 + 0.3) • Gm¡„ |
| 3 | Потеря несущей способности рабочих тяг | р 1 нес | (0.65 -5-1,5)- GU |
| 4 | Усилие запирания прижатого остряка к рамному рельсу | р 1 зап | (0,05 + 0,1) • Gmin |
| 5 | Предел устойчивости колесной пары от | Р 1 уст | — 3 ■ Gmin |
| выдавливания из колеи |
Главным приоритетом при разработке конструкции любого стрелочного привода является обеспечение безопасного прохода по стрелке подвижного состава. В конструкции стрелочного привода безопасное движение подвижного состава по стрелке обеспечивает механизм замыкания шибера.
При прохождении подвижного состава по стрелке механизм замыкания через шибер испытывает дополнительные воздействия от колесной пары каждой подвижной единицы. Конструкция механизма замыкания шибера должна обладать необходимым запасом прочности, и величина расчетного усилия удержания прижатого остряка к рамному рельсу должна обеспечить надежное неотпирание механизма при воздействии колесной пары на остряк. Поэтому необходимо знать значения сил, воздействующих через шибер на механизм замыкания привода, при прохождении по стрелочному переводу подвижного состава с различными скоростями движения.
Исследование работы электропривода в режиме взреза стрелки
При исследовании режима взреза стрелки используем следующие графические параметры и технические характеристики:
- профиль колесной пары (ГОСТ 9036);
- профиль стандартного рамного рельса типа Р65 (ГОСТ 8161);
- профили стандартного острякового рельса и рамного рельса (ГОСТ 7174).
Учитывая, что колесная пара движется по всей длине остряка, выражение силы, действующей на остряк, приведенное к точке удержания остряка шибером электропривода (рис.2.15), имеет следующий вид:
Рис.2.14. Реакция рамного рельса и прижатого остряка на воздействие колесной пары
Математическая модель определения сил, действующих в стрелочном переводе при взрезе стрелки
При прохождении колесной пары по стрелке на рамный рельс действуют следующие силы:
• Ртр — силы трения в кинематической паре: подошвы остряка и подкладки остряков. Вектор силы трения направлен в сторону, противоположную движению остряка, т.е. в сторону, противоположную вектору ¥. Сила ¥тр состоит из двух составляющих ¥трХ и Ттр2:
ЕтрХ — сила трения массы остряков об подкладки в отсутствии колесной пары на стрелке численно равна усилию перевода остряков , приведенного к центру масс остряка. т0— масса остряка; Ь — длина остряка; g — ускорение свободного падения; /тр- коэффициент трения.
В таблице 2.7 приведены результаты расчета усилий перевода и усилий взреза стрелки для различных типов стрелочных переводов и марки крестовины, применяемых на горках для самой легкой подвижной единицы.
| № | Тип | Марка | Длина | Масса | Усилие пе | Усилие | Усилие |
| пере | кре | остря | остряка, | ревода, | взреза, Гв1 | взреза, Гвз | |
| вода | стови | ка, Ь | т0 | пер | для б>ш-,г | для Отах | |
| ны | мм | кг | н | Н | Н | ||
| 1 | Р65 | 1/9 | 7000 | 586,6 | 4028,18 | 9019,12 | 13139,35 |
| 2 | Р50 | 1/9 | 6515 | 422,2 | 2698,21 | 10349,09 | 14469,32 |
| 3 | Р65 | 1/6 | 5350 | 448,3 | 2352,84 | 10694,41 | 14814,69 |
| 4 | Р50 | 1/6 | 4340 | 281,2 | 1197,22 | 11849,78 | 15970,31 |
Усилие взреза стрелки в зависимости от типа стрелочного перевода варьируется от 9019,12 Н до 15970,31 Н.
Для расчета технических характеристик механизма взреза быстродействующего стрелочного привода целесообразно использовать интервал значений, соответствующий движению по стрелке четырехосной металлической платформы (9000-^12000 Н). Конструкция механизма взреза, рассчитанная по методике приведенной выше, гарантирует взрез стрелки при проходе более «тяжелых» подвижных единиц.
Выводы по главе
- Декомпозиция процесса функционирования стрелочного перевода, оборудованного быстродействующим стрелочным электроприводом, позволила классифицировать режимы работы быстродействующего стрелочного электропривода с позиции оценки степени влияния на безопасность движения поездов по стрелке:
а) при занятом участке:
- динамический режим работы;
- режим взреза стрелки,
б) при свободном участке:
- режим перевода стрелки (активный режим);
- статический (пассивный) режим работы.
2. В связи с изменившимися условиями эксплуатации актуальным является корректировка времени перевода стрелки. В результате исследований установлено, что максимальное время перевода стрелки составляет 0,62 с.
3. Произведен расчет тяговых усилий для различных типов стрелочных переводов, применяемых на горках. Установлено, что усилия перевода остряков с учетом коэффициента трения составляет:
- для стрелочного перевода марки Р65 М1/9 — 755-^-1490 Н;
- для стрелочного перевода марки Р50 М1/6 — 270^540 Н.
- Разработана методика определения усилия взреза стрелочного перевода, оборудованного взрезным и невзрезным стрелочным приводом. Установлено, что усилие взреза для самой легкой подвижной единицы составляет 9019,12-11849,78 Н.
- Разработан математический аппарат для исследования изменения энергии остряков стрелки в процессе перевода. Основным фактором, влияющим на надежность функционирования быстродействующего стрелочного электропривода и стрелочного перевода, является скорость перевода стрелки, масса остряков и боковая жесткость рамного рельса.
- На основе проведенных исследований предложена эквивалентная схема замещения системы «рамный рельс — остряк», позволяющая воспроизвести характер поведения системы в конце перевода стрелки. Установлено, что демпфирование кинетической энергии остряков в конце перевода стрелки осуществляется только за счет сил трения между остряками и стрелочными подкладками, без снижения ее электроприводом, что приводит к ударам остряка о рамный рельс, его отжиму и «отбою».
- Скорость движения остряков стрелки, оборудованной быстродействующим стрелочным электроприводом на порядок больше по сравнению с электроприводом электрической централизации, что приводит к более значительным ударным воздействиям на рамный рельс. В результате удара остряка об рамный рельс возникает смещение рамного рельса от своего первоначального положения, что со временем приводит к неконтролируемому уширению колеи.
- Предложенная математическая модель поведения системы «рамный рельс — остряк» позволила оценить уширение колеи в момент удара. Анализ полученных значений показал, что величина максимального смещения рамного рельса находится в интервале, сопоставимом с величиной допустимого зазора между остряком и рамным рельсом, а в отдельных случаях превышает его. Суммарный зазор между остряком и рамным рельсом при определенных условиях может привести к сходу поезда.
- В результате проведенных исследований доказана необходимость введения в конструкцию быстродействующего стрелочного электропривода механизма гашения энергии остряков в конце перевода стрелки, что позволит повысить безопасность движения поездов.