- Структурный синтез ВСП для маневровых районов
- Структурный синтез быстродействующего стрелочного электропривода для ГАЦ
- Выводы по главе
- Заключение
Цикл статей:
Глава 1 — Введение. Цели и задачи исследований.
Глава 2 — Структурный анализ режимов работы БСП
Глава 3 — Методы защиты стрелочного перевода от ложного контроля
Глава 4 — Методы построения быстродействующих стрелочных приводов
Заключение.
Построение рациональной структуры быстродействующего стрелочного привода для работы в системе автоматизированной сортировочной станции осуществляется по двум направлениям:
- создание быстродействующего стрелочного электропривода для маневровых районов;
- создание быстродействующего стрелочного электропривода для ГАЦ. Разработка конструкции быстродействующего стрелочного привода подразделяется на два этапа:
- выбор элементов и построение структурной схемы (структурный синтез);
- определение параметров этих элементов (параметрический синтез).
Требования, предъявляемые к конструкции быстродействующего стрелочного привода должны обеспечиваться синтезом следующих условий:
- требуемое быстродействие привода;
- надежное запирание прижатого остряка к рамному рельсу в любых условиях эксплуатации;
- исключение возможности остановки остряка в среднем положении при возникновении внештатных ситуаций;
- надежный контроль крайних положений стрелки;
- диагностику состояния электропривода и стрелочного перевода;
- уменьшение времени восстановления работоспособности электропривода при взрезе стрелки;
- оптимизацию конструкции и массогабаритных показателей электропривода;
- продление срока службы стрелочного привода и стрелочного перевода в целом.
Анализ отечественного и зарубежного опыта создания конструкций стрелочных приводов (Приложение 1) показывает, что наибольшее распространение получили конструкции внутреннего запирания шибера. Учитывая тенденции роста грузопотоков можно утверждать, что перерабатывающая способность отечественных горок в перспективе возрастет, т.е. значительно увеличится интенсивность движения по стрелкам, горочный технологический интервал сократится до минимума, и как следствие ужесточаются требования к надежности, безопасности и технологической эффективности быстродействующих стрелочных электроприводов.
Основные требования к быстродействующему стрелочному электроприводу и стрелочному переводу в целом, учитывая требования к надежности и меры обеспечения безопасности движения поездов, можно сформулировать, исходя из трех основных критериев:
- Гарантированное выполнение силовых функций, действующих в стрелочном переводе и воспринимаемых электроприводом;
- Надежное выполнение алгоритма работы электропривода;
- Контроль состояния электропривода и стрелочного перевода в целом.
Структурный синтез ВСП для маневровых районов
Функционирование стрелочных электроприводов в маневровых районах сортировочных станций заключается в обеспечении бесперебойного процесса расформирования/формирования составов с учетом специфики работы подвижного состава в маневровом районе, а именно — невысокие скорости движения поездов и большая интенсивность движения. Время перевода стрелки, оборудованной быстродействующим стрелочным электроприводом для маневровых районов, составляет 1,5-2,0 секунды [84].
Специфической особенностью стрелочных приводов для маневровых районов является способ восприятия взреза стрелки или взрезаемость [85]. На практике нашли применение как взрезные, так и невзрезные стрелочные приводы. Взрезные приводы надежно предохраняют от повреждений стрелку, гарнитуру и элементы самого привода лишь при низких скоростях взрезов. Это объясняется тем, что при высоких скоростях взрезов в большей степени проявляется инерция подвижных частей стрелки, гарнитуры и привода. Следует наряду с этим отметить, что невзрезные приводы по безопасности, надежности и экономичности имеют преимущества перед взрезными.
Взрез стрелочного перевода с невзрезным стрелочным электроприводом приводит к остаточным деформациям остряков, уширению бокового и сужению прямого пути, деформации соединительных и рабочих тяг, повреждению электропривода. Остряки деформируются преимущественно в зоне строжки на участке 1000-И 400 мм от острия. Деформация остряка стрелочного перевода Р50 достигает 17 мм, стрелочного перевода Р65 — 9 мм [68].
При перемещении взрезаемого остряка стрелки с типовой гарнитурой от воздействия движущейся колесной пары возникает два варианта взреза (рис.4.1):
- воздействие на шибер через тяги, при котором шибер стремится «войти» внутрь электропривода, в этом случае величина передаваемого в запирающий механизм усилия определяется несущей способностью рабочей тяги и составляет 32 кН;
- воздействие на шибер, при котором шибер, «вытягивается» из электропривода, в этом случае величина передаваемого через рабочую тягу усилие «выталкивания» составляла 76 кН.
Последствиями взреза стрелки, оборудованной невзрезным стрелочным электроприводом, является временное прекращение движения по стрелочному переводу, что приводит к задержкам в процессе расформирования/формирования составов и снижению технологической эффективности сортировочной станции.
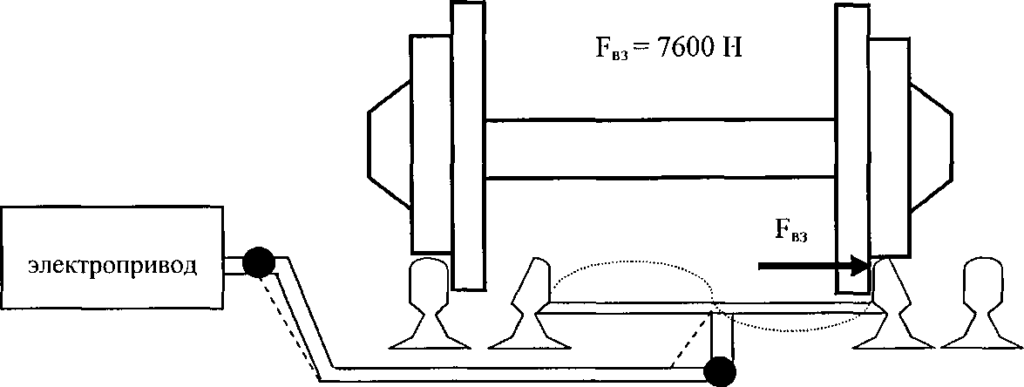
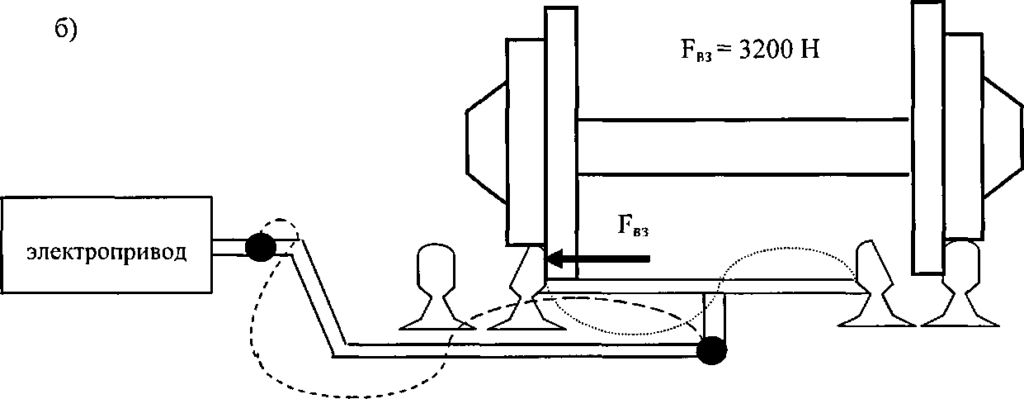
Рис.4.1. Деформация рабочей тяги при взрезе стрелки при положении шибера: а) шибер втянут; б) шибер выдвинут
Поэтому для стрелочных приводов, предназначенных для работы в маневровых районах, следует избрать вариант построения взрезного привода, что позволит быстро восстановить работоспособность стрелочного перевода в случае взреза стрелки. Электропривод в локальном взрезном исполнении удобен с производственной точки зрения — простое изъятие взрезного механизма из набора сборочных узлов позволяет получить невзрезной электропривод.
В нормальном режиме функционирования стрелочного перевода, оборудованного взрезным электроприводом, должно обеспечиваться единство шибера и механизма запирания, а при взрезе — их разъединение с обязательным контролем взреза внутри электропривода и невозможностью получения ложного контроля. Таким образом, при взрезе стрелки, взрезной стрелочный привод должен обеспечить:
- безопасный проход подвижного состава по стрелке;
- предсказуемость поведения элементов стрелки и электропривода при взрезе;
- невозможность получения ложного контроля до полного устранения последствий взреза;
- надежный контроль взреза стрелки системой контроля электропривода;
- наглядность произошедшего взреза;
- возможность быстрого восстановления функционирования стрелочного перевода (электропривода).
Исходя из функциональных задач электропривода, работающего в маневровых районах сортировочных станций, можно сделать вывод о возможности использования унифицированных узлов и блоков со стандартными техническими характеристиками электроприводов, применяемых для работы в системе ЭЦ [33, 37, 38, 86]. Отличительной чертой такого стрелочного привода является наличие двух дополнительных узлов:
- узла взреза;
- блока контроля взреза.
Структурная схема электропривода со встроенным механизмом взреза представлена на рисунке 4.2. На схеме использованы следующие обозначения:
ИП — источник питания;
БУ — блок управления;
АП — автопереключатель;
ЭД — электродвигатель;
Р — редуктор;
МВ — механизм взреза;
ЗМ — механизм замыкания шибера;
СМ — следящий механизм;
Остр. — остряки.
Построение быстродействующего стрелочного электропривода, предназначенного для работы в маневровых районах сортировочных станций, рационально производить используя указанную схему. Для выключения электродвигателя приходится воздействовать на орган управления либо параметрически по тому же каналу, либо передавая команду на выключение по отдельному каналу. Сложностью является необходимость обеспечения высокой защищенности каналов, так как в противном случае появление помех может привести к остановке стрелки в среднем положении, что недопустимо. Решить вопрос помехозащищенности каналов можно следующим способом — расположить пусковой прибор непосредственно в корпусе электропривода (например, тиристоры с самокоммутацией; магниточувствительные диоды для электродвигателя постоянного тока; магнитные усилители для электродвигателя переменного тока). Но увеличение количества напольных приборов нежелательно, т.к. это усложняет конструкцию привода, снижает надежность его работы.

Рис.4.2. Структурная схема контактного взрезного электропривода
На рисунке 4.3 представлена конструкция механизма замыкания шибера, совмещенная с узлом взреза, и кинематика процесса перевода остряков.
Рис.4.3. Конструкция механизма запирания шибера со встроенным узлом взреза
Шибер представляет собой конструкцию из шибера 1, состоящего из двух выходных концов круглого сечения, и средней части прямоугольного сечения с проточками, где устанавливаются шарнирно на осях 4, 5 кулачки 2, 3, обеспечивающие надежное замыкание стрелки при проходе по ней подвижного состава. Механизм замыкания и взреза состоит из шиберной части 1, толкателя 6 и упругого упора, который представляет собой три элемента: упор левый 8, упор правый 9, разведенные пружиной 7.
При взрезе стрелки усилие воздействия на шибер от колесной пары превосходит величину его удержания — усилия фиксации шибера. Упор 8 под действием этой силы, действующей через кулачок 2, преодолевая усилие пружины 7, сжимает ее и, при неподвижном положении толкателя 6, шибер осуществляет движение в направлении действия силы взреза (слева направо). При этом кулачок 2 выходит из контакта с выступом толкателя 6 о поверхность «А», проворачивается на своей оси 4 и, дальнейшее движение шибера происходит беспрепятственно. Электропривод взрезан. Рассмотренная конструкция механизма взреза является унифицированной, что позволяет, заменив упоры 8, 9 и пружину 7 на жесткие упоры, получить невзрезной стрелочный привод.
Узел контроля взреза (рис.4.4) является дополнительным электромеханическим устройством, разрывающим цепь электропитания двигателя (2-е фазы) и цепь контроля (БДР) при срабатывании взрезного устройства электропривода. Конструкция узла не позволяет осуществить включение двигателя с поста и исключает любую возможность получения ложного контроля стрелки до полного остановления электропривода и стрелочного перевода обслуживающим персоналом.
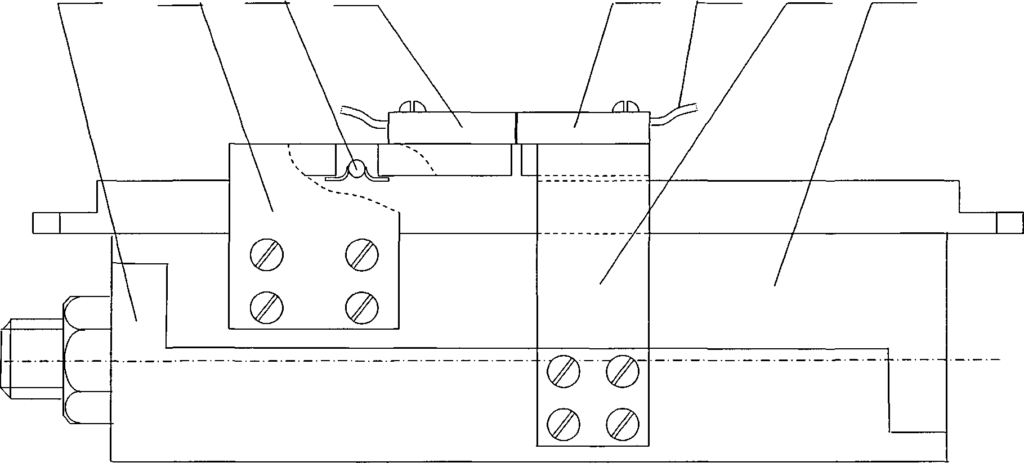
Рис.4.4. Конструкция электромеханического узла контроля взреза электропривода
Узел контроля взреза представляет собой плоский штыревой разъем (типа ШР-5) поз. 1, 2, установленный на 2-х стойках 3 и 4, которые закреплены раздельно на подвижных упорах 5 и 6 взрезного устройства. Причем, ответная часть 1 разъема закреплена на стойке шарнирно. При взрезе стрелки, упоры 5 и 6 смещаются относительно друг друга на величину 15 мм, что приводит к разъединению разъема, который под действием пружины 7, поднимает ответную часть 1 разъема и, тем самым, разводит их в стороны. Конструкция узла контроля взреза не позволяет произойти самопроизвольному или принудительному восстановлению разъема в первоначальное состояние без проведения операций по восстановлению взреза. Монтажный жгут 8 электрической цепи распаивается непосредственно на соответствующие выводы разъема.
Структурный синтез быстродействующего стрелочного электропривода для ГАЦ
Оптимальными критериями безопасности движения отцепов и эффективности работы стрелочного перевода, оборудованного быстродействующим стрелочным электроприводом для работы в системе горочной автоматической централизации, являются:
- максимальное быстродействие;
- максимальный радиус управления;
- минимальные потери энергии при переводе стрелки.
Требование минимального времени перевода стрелки ГАЦ является доминирующим, поэтому для оптимизации быстродействующего стрелочного электропривода определяющим фактором является максимальное быстродействие электропривода [84]. Структурная схема быстродействующего стрелочного электропривода представлена на рисунке 4.5 [44, 87].
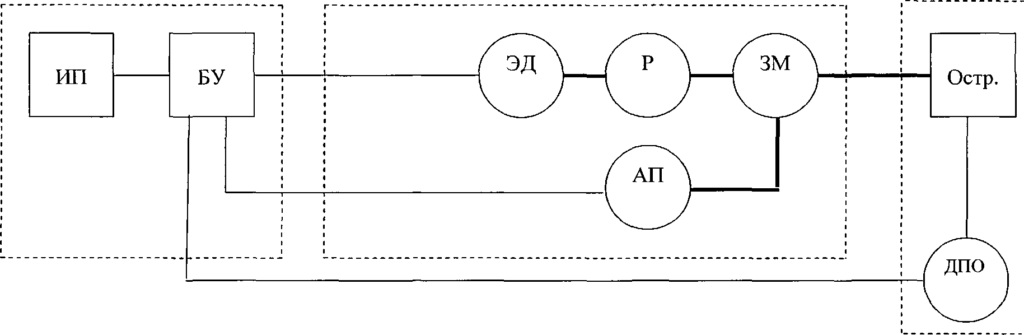
Рис.4.5. Структурная схема быстродействующего невзрезного электропривода
На схеме тонкими линиями обозначены электрические связи, жирными — механические. Для бесконтактной коммутации рабочего канала можно использовать контрольный канал (контрольную цепь). Орган управления (ОУ) осуществляет пуск электродвигателя (ЭД) не через автопереключатель (АП), а непосредственно. Выключение электродвигателя производит также орган управления электроприводом, вслед за фиксацией через контрольный канал окончания перевода стрелки.
Особенностью рассматриваемой структуры быстродействующего стрелочного электропривода является некоторое запаздывание момента выключения рабочей цепи электродвигателя относительно момента фактического окончания перевода стрелки. Теоретически это должно приводить к работе электродвигателя на фрикцию. Но практически указанная особенность проявляться не будет, так как у быстродействующих приводов фрикцион в конце перевода вращается за счет кинетической энергии, запасенной движущимися частями стрелки и электропривода в процессе срабатывания. Контроль фактического положения остряков стрелки осуществляется непосредственно датчиками контроля положения остряков (ДПО), закрепленными на рамных рельсах.
Для обеспечения требуемого быстродействия быстродействующим стрелочным электроприводом в их конструкциях целесообразно предусмотреть уменьшение хода шибера. Обоснование изменения величины хода шибера заключается в следующем: конструкция стрелочных гарнитур выполнена применительно к стрелочным переводам с шириной колеи 1520 мм. Стрелочные гарнитуры в комплекте с электроприводом, установленные на стрелке, должны обеспечивать плотное прилегание прижатого остряка в крайних положениях стрелки при ее исправном состоянии и нормальной ширине колеи [10]. Крайним называют такое положение стрелки, при котором прижатый остряк заперт и прилегает к рамному рельсу с зазором менее 4 мм, а отведенный остряк отстоит от своего рамного рельса на расстояние не менее 125 мм.
Шаг остряка, измеренный метрической линейкой против первой связной тяги, должен быть не менее 147 мм. Для основной массы электроприводов централизованных стрелок принят ход остряков 154 мм. Разница между этими двумя величинами составляет: 154 — 147 = 7 мм. Эта величина называется «прогибом» остряка и учитывает суммарную величину люфтов в шарнирных соединениях, а также максимально возможную величину прогиба рабочей тяги и гарнитуры. Она обеспечивает надежное функционирование стрелочного перевода.
При расчете значения хода шибера быстродействующего стрелочного электропривода необходимо учитывать люфты в шарнирных соединениях [48, 78]:
- шибера с рабочей тягой — 0,5 мм;
- контрольных линеек с контрольными тягами — 0,5 мм;
- контрольных тяг с сережками — 0,5 мм;
- рабочей тяги со связной — не более 1 мм;
- связной с сережками — не более 1 мм.
Суммарное значение величины люфтов в шарнирных соединениях составляет 3,5 мм.
Минимальная величина хода остряков актуальна с точки зрения быстродействия электропривода. Поэтому величина хода шибера быстродействующеего стрелочного электропривода находится как сумма следующих величин:
- максимально возможное значение величины прилегания прижатого остряка к рамному рельсу (4 мм);
- необходимая, по условиям безопасности, величина отхода отведенного остряка от своего рамного рельса (125 мм);
- величина максимально возможного «прогиба» остряка (7 мм).
125 + 4 + 7 = 136мм
Значения величины допустимого увеличения и сужения колеи составляют соответственно (+4;-2) мм.
Учитывая приведенные доводы, а также необходимость регулировки хода остряков при установке электропривода на стрелку, величину хода шибера для быстродействующего стрелочного электропривода целесообразно принять равной 140 мм, с возможностью регулировки в пределах ± 3 мм.
Условия работы горочного стрелочного электропривода характеризуются большой интенсивностью переводов (до 120 переводов в час) и предельно малым временем перевода. Кинетическая энергия остряков в конце перевода стрелки преобразуется в удар, воспринимаемый рамным рельсом и через гарнитуру электроприводом, что приводит к «отжиму» рамного рельса, преждевременному износу узлов и деталей электропривода и стрелочного перевода в целом [88, 89]. Поэтому стрелочные электроприводы для ГАЦ необходимо оснащать устройством демпфирования кинетической энергии стрелки в конце перевода остряков, использование которого повысит надежность работы всего технического комплекса стрелочного перевода. Использование в конструкции быстродействующего стрелочного электропривода механизма демпфирования кинетической энергии остряков позволяет реализовать выполнение следующих функций:
- демпфирования кинетической энергии движущихся частей электропривода и стрелки в конце перевода, снижение их воздействия на рамный рельс, а также ликвидация такого явления как «откат» механизма замыкания стрелки.
- замыкание и удержание шибера электропривода в крайнем положении с заданным усилием.
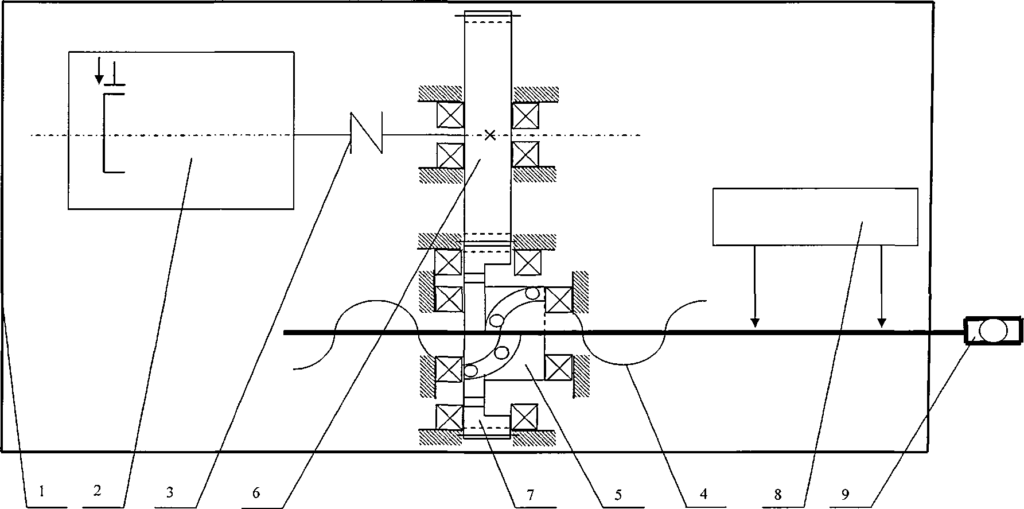
На основе предложенных теоретических предпосылок разработана кинематическая схема невзрезного быстродействующего стрелочного электропривода для горок (рис.4.6), оборудованного электромагнитным тормозом.
Рис.4.6. Кинематическая схема невзрезного быстродействующего стрелочного электропривода
На схеме использованы следующие обозначения:
- — корпус;
- — асинхронный электродвигатель с электромагнитным тормозом;
- — муфта кулачковая;
- — винт шарико-винтовой пары;
- — гайка шарико-винтовой пары;
- — колесо зубчатое (ведущее);
- — колесо зубчатое (ведомое);
- — датчики положения шибера (автопереключатель);
- — шибер.
Разработанная конструкция невзрезного быстродействующего стрелочного электропривода для горочной автоматической централизации повышает безопасность движения отцепов по стрелке и эффективность функционирования сортировочной станции. Кроме того, предложенная конструкция быстродействующего стрелочного электропривода обладает рядом преимуществ по сравнению с применяемым быстродействующим приводом СПГБ-4. Сравнительный анализ технических характеристик невзрезного быстродействующего стрелочного электропривода и стрелочного электропривода СПГБ-4 приведен в таблице 4.1.
| № п/п | Технико-экономические показатели | Электроприводы | |
| СПГБ-4М | БСП | ||
| 1 | 2 | 3 | 4 |
| 1 | Номинальный ход шибера, мм | 154±2 | 140 регулируемый |
| 2 | Величина хода контрольных линеек, мм | 154±2 | |
| 3 | Номинальное усилие перевода, Н | 1000 | 2000 |
| 4 | Максимальное усилие перевода, Н | 2000 | 4000 |
| 5 | Номинальное время перевода, с | 0,5-0,6 | 0,5-0,6 |
| 6 | Усилие удержания шибера, Н | 6500-8000 | 4500-6000 |
| 7 | Усилие взреза, Н | — | 9000-12000 вариант исполнения |
| 8 | Напряжение питания, В | 200 | 220 |
| 9 | Род тока | постоянный | переменный трехфазный |
| 10 | Масса, кг | 180 | 100 |
| 11 | Средняя наработка на отказ, не менее, переводов при номинальной нагрузке | 6,0 х 105 | 8,0 х 10ь |
| 12 | Назначенный ресурс, не менее, переводов при номинальной нагрузке | 1,0 х 106 | 1,5 х 106 |
| 13 | Средний срок службы, лет | 3 | 5 |
| 14 | Номинальная частота перевода, пер./мин. | 10 | 30 |
| 15 | Демпфирование кинетической энергии остряков в конце перевода стрелки | + | |
| 16 | Упрощение кинематической схемы | + | |
| 17 | Повышение уровня технологичности и унификации | + | |
| 18 | Снижение эксплуатационных расходов | + | |
| 19 | Повышение уровня безопасности движения поездов | + | |
4.3 Электромагнитный тормоз для электроприводов ГАЦ. Особенности конструкции и методика расчета его основных параметров
Процесс перевода остряков стрелки, с точки зрения изменения кинетической энергии, делится на три фазы:
- разгон — приведение остряков из состояния покоя в состояние равномерного движения;
- равномерное движение с установившейся скоростью (установившийся режим);
- торможение — приведение остряков стрелки из состояния движения в состояние покоя.
Механические воздействия со стороны остряков в конце перевода стрелки воспринимаются электроприводом и стрелочного перевода именно в третьей фазе процесса перевода остряков. Перемещение остряков быстродействующим стрелочным электроприводом происходит за 0,5 секунды со скоростью 400 мм в секунду. За это время движущиеся части стрелки запасают огромную кинетическую энергию. Кинетическая энергия остряка увеличивается за счет кинетической энергии вращающихся масс самого электропривода. В большинстве отечественных и зарубежных стрелочных электроприводах фаза торможения движения остряков осуществляется без участия механики электропривода, т.е. скорость движения остряков остается неизменной до момента отключения электродвигателя. Рассмотрев процесс перевода остряков стрелки с энергетической точки зрения, можно утверждать, что работа по поглощению кинетической энергии в конце перевода стрелки происходит лишь за счет работы сил трения в кинематических парах: остряк — стрелочные подкладки, упругих сил рамного рельса и гарнитуры, без демпфирования ее электроприводом. На практике это приводит к ударам остряка о рамный рельс, его отжиму и «отбою» остряков, ударам и откату силового механизма электропривода, кроме того, имелись случаи излома остряков.
Приведенные выше аргументы доказывают необходимость применения в конструкции БСП устройства гашения запасенной энергии электропривода и стрелки. Таким образом, рассматривая функциональное назначение электромагнитного тормоза в конструкции электропривода, можно сформулировать следующее его основное назначение:
Первое — электромагнитный тормоз предназначен для гашения энергии, запасенной движущимися элементами электропривода и стрелки (остряками) в конце перевода, снижения последствий их воздействия на рамный рельс и ликвидации такого явления, как «откат» механизма замыкания стрелки. На рисунке 4.7 представлена кинематическая схема электромагнитного тормоза, совмещенного с электродвигателем, и введены следующие обозначения:
- — корпус электромагнитного тормоза и электродвигателя;
- — ротор электродвигателя;
- — статор электродвигателя;
- — правый подшипниковый щит с подшипником;
- — левый подшипниковый щит с подшипником;
- — конец вала электродвигателя, обработанный под курбель;
- — обмотки электромагнита;
- — якорь электромагнитного тормоза;
- — тормозной диск с металлокерамическими накладками;
- — комплект пружин.
Вторым предназначением электромагнитного тормоза является замыкание и удержание шибера электропривода в крайнем положении с заданным усилием.
Конструктивно, торможение осуществляется за счет сил трения тормозного диска об поверхность якоря и подшипникового щита. Силы трения возникают в результате действия упругих сил комплекта пружин, прижимающих якорь электромагнита к тормозному диску. Торможение осуществляется при отключении питания электродвигателя. Схема включения электромагнитного тормоза приведена на рисунке 4.8.
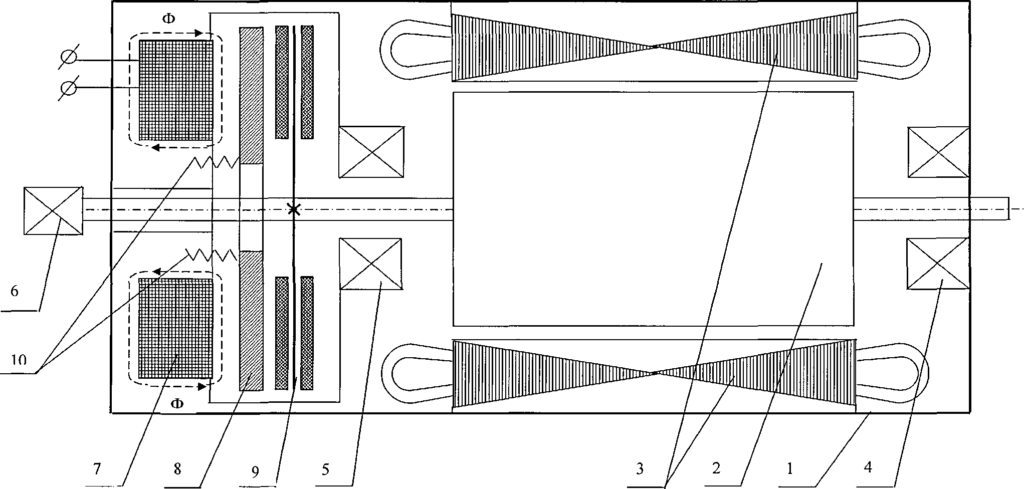
Рис.4.7. Кинематическая схема электромагнитного тормоза, совмещенного с электродвигателем
Вследствие специфики применения определенных типов стрелочных переводов на горках и движении по ним «легких» подвижных единиц, по своему назначению электромагнитный тормоз, согласно техническим требованиям, должен компенсировать усилия на шибере в диапазоне 1500-^4000 Н.
Принцип работы электромагнитного тормоза заключается в следующем: при отсутствии питания на электродвигателе комплект пружин удерживает в прижатом состоянии якорь и тормозной диск, тем самым, обеспечивая удержание шибера с заданным усилием. При включении электродвигателя, электромагнитные силы тормоза должны преодолеть усилие комплекта пружин и притянуть якорь, освободив при этом тормозной диск.
Усилие торможения Р0, с которым якорь прижимается к тормозному диску, определяется величиной тормозного момента Мт, зависящим от усилия на шибере. Усилие Р0 регулируется затяжкой пружин, что позволяет регулировать тормозной момент Мт. Момент трения (тормозной момент) для кольцевого элемента шириной с1г равен:
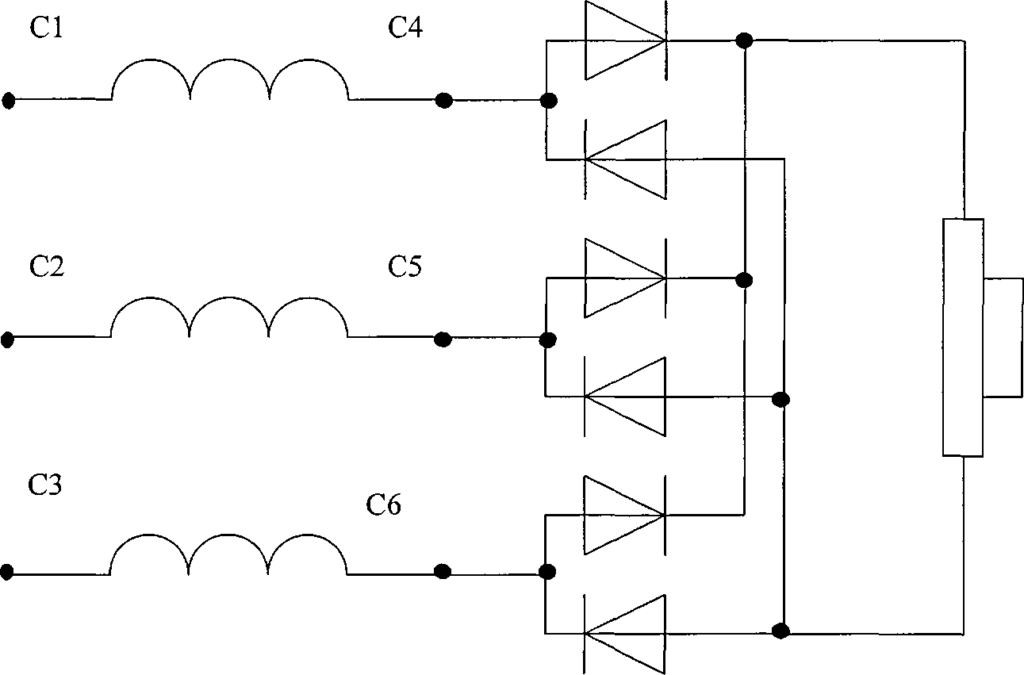
Рис.4.8.Схема включения электромагнитного тормоза и электродвигателя
Механический расчет обеспечения надежности крепления электромагнитного тормоза сводится к определению прочностных характеристик шпонки тормозного диска.
Выводы по главе
- В основу синтеза быстродействующих стрелочных электроприводов положены решения следующих функциональных задач:
- гарантированное исключение опасного влияния силовых факторов, действующих в стрелочном переводе и воспринимаемых электроприводом;
- надежное выполнение своих функций во всех режимах работы электропривода;
- контроль состояния электропривода и стрелочного перевода в целом.
2. Разработаны предложения по построению рациональных структур быстродействующих стрелочных электроприводов, исходя из их функциональных задач, на основе унификации стандартных узлов и блоков. Реализация предложений осуществлена по двум направлениям:
- создание стрелочного электропривода для маневровых районов;
- создание стрелочного электропривода для механизированной горки.
3. Применительно к особенностям работы в маневровом районе разработана структурная схема быстродействующего стрелочного привода, которая предусматривает возможность быстрого восстановления электропривода в случае взреза стрелки. Поэтому схема электропривода для маневровых районов содержит два дополнительных узла:
- взрезное устройство;
- блок контроля взреза.
4. В основу синтеза БСП положены решения следующих функциональных задач:
- обеспечение безопасного прохода подвижного состава по стрелке;
- предсказуемость поведения элементов электропривода при взрезе;
- невозможность получения контроля положения стрелки до полного устранения последствий взреза;
- наглядность и надежный самоконтроль взреза стрелки контрольной системой электропривода;
- обеспечение возможности быстрого восстановления работоспособности стрелочного электропривода.
5. При создании быстродействующих стрелочных электроприводов учтены разработанные ранее рекомендации о введении в конструкцию БСП электромагнитного тормоза для гашения кинетической энергии остряков в конце перевода стрелки с целью повышения надежности функционирования стрелочного комплекса и безопасности проследования отцепов по стрелке.
Заключение
В диссертации решена задача создания быстродействующих стрелочных электроприводов, определены методики и критерии, имеющие актуальное научное значение для оценки существующих конструкций на соответствие их требованиям безопасности движения поездов, надежности и эффективности работы, а также при подготовке и проведении сертификации стрелочных приводов. В диссертации получены следующие результаты:
- На основе проведенных исследований работы современной сортировочной станции сформулированы требования к функциям и технологичности стрелочных приводов. Определены направления реализации повышения безопасности движения по стрелке путем создания новых быстродействующих стрелочных приводов и применением диагностики электропривода и стрелочного перевода как единого технического комплекса.
- Разработаны методы построения быстродействующих стрелочных электроприводов на основе системного подхода к определению технических характеристик, требований по надежности и обеспечению безопасности движения по стрелочному переводу. Сформулированы эксплуатационно-технические требования к ним.
- Уточнены временные и силовые характеристики быстродействующих стрелочных приводов, с учетом тенденции увеличения объема и массы перерабатываемых грузопотоков, числа длиннобазных вагонов, а также с учетом применения новых марок стрелочных переводов. Предложены рекомендации по корректировке технических параметров быстродействующих стрелочных приводов, которые реализованы при разработке конкретных конструктивных решений.
- Разработана методика расчета усилия взреза и теоретическим путем получены аналитические соотношения, позволяющие определять значения усилий взреза для различных стрелочных переводов, применяемых на сортировочных станциях. С позиции обеспечения безопасности движения по стрелке исследован характер поведения стрелочного перевода при взрезе стрелки, оборудованной взрезным и невзрезным электроприводами.
- Разработана математическая модель взаимодействия рамного рельса и остряка в конце перевода стрелки, которая позволила оценить характер и результаты их поведения в момент удара, а также определить значения отклонения рамного рельса.
- Проведены аналитические исследования существующих методов контроля положения стрелки на предмет обеспечения ими безопасности движения. Предложен метод модернизации типовых схем контроля стрелочного перевода как единого технического комплекса, предусматривающий выявление его пре- дотказного состояния. Данный метод контроля позволяет перейти от регламентных работ к ремонтно-восстановительным методам обслуживания стрелочного перевода, и тем самым повысить его надежность и производительность труда эксплуатационного штата.
- На основе разработанной методологии и результатов проведенных теоретических исследований разработаны кинематические схемы быстродействующих стрелочных приводов с учетом требований оптимальности конструкции.
- Результаты теоретических исследований, предложенные рекомендации и технические решения реализованы в опытных образцах быстродействующих стрелочных электроприводов, изготовленных на Армавирском электромеханическом заводе и ОАО «Термотрон», которые проходят опытную эксплуатацию на Юго-Восточной железной дороге.
ЛИТЕРАТУРА
- Апатцев В.И. Оптимизация работы железнодорожных узлов. // Железнодорожный транспорт. — 1998. — № 11. — С. 2.
- Щелоков А.И., Шапкин И.Н. Новое в технологии и управлении перевозками. // Железнодорожный транспорт. — 1995. -№8. — С. 8.
- Шафиркин В.Б. Совершенствование управления перевозками. // Железнодорожный транспорт. — 2000. — №3. — С. 40.
- Гришин С.А. Стратегия управления перевозками на современном этапе. // Железнодорожный транспорт — 2001. — №1. — С. 10-17.
- Белобородов Ю.Н., Тиличенко А.Г. Оперативное управление перевозками. // Железнодорожный транспорт. — 1997. -№11.- с.45.
- Смехов A.A. и др. Автоматизация грузовой работы железных дорог. — М., — Транспорт, 1977. С. 257.
- Поддавашкин Э.С., Тишкин Е.М. Автоматизация управления вагонным парком. // Железнодорожный транспорт; — 1998. -№4. — С .23.
- Бородин А.Ф. Управление вагонопотоками в современных условиях. // Железнодорожный транспорт. — 1996. — №5. — С. 10.
- Аветикян М.А. Высокие технологии перевозочного процесса. // Железнодорожный транспорт — 2001. — №11. — С. 73.
- Правила технической эксплуатации железных дорог Российской Федерации, — М.: Транспорт, — 2000. — 191 с.
- Анализ состояния безопасности движения поездов и работы устройств СЦБ, механизированных горок в хозяйстве сигнализации, связи и вычислительной техники за 1997 год. Москва. МПС. Управление сигнализации, связи и ВТ. — 1998.-21 с.
- Анализ состояния безопасности движения поездов и работы устройств СЦБ, механизированных горок в хозяйстве сигнализации, связи и вычислительной техники за 1998 год. Москва. МПС. Управление сигнализации, связи и ВТ. — 1999.-20 с.
- Анализ состояния безопасности движения поездов и работы устройств СЦБ, механизированных горок в хозяйстве сигнализации, связи и вычислительной техники за 1999 год. Москва. МПС. Управление сигнализации, связи и ВТ. — 2000. — 23 с.
- Анализ состояния безопасности движения поездов и работы устройств СЦБ, механизированных горок в хозяйстве сигнализации, связи и вычислительной техники за 2000 год. Москва. МПС. Управление сигнализации, связи и ВТ.-2001.-25 с.
- Железнодорожный транспорт в 1995 году: цифры и факты. // Железнодорожный транспорт — 1996, №4.
- Железнодорожный транспорт в 1996 году: цифры и факты. // Железнодорожный транспорт — 1997, №4.
- Железнодорожный транспорт в 1997 году: цифры и факты . // Железнодорожный транспорт — 1998, №5.
- Железнодорожный транспорт в 1999 году: цифры и факты. // Железнодорожный транспорт. — 2000, №5.
- Статистический отчет о работе железных дорог за 1999 год. — М.: МПС. Управление статистики. — 2000. — С. 60.
- Железные дороги России в 2000 году. // Железнодорожный транспорт. -2001, №4.-С. 2-4.
- Железно дорожный транспорт в цифрах. // Железнодорожный транспорт. — 1997.-№10. — С. 2-3.
- Железнодорожный транспорт в 1998 году: цифры и факты. // Железнодорожный транспорт. — 1999. — №5. — С. 7-12.
- Однопозов Ю.А., Хилькевич И.А. Электрическая централизация маневровых районов станций. — М.: — Транспорт, — 1985. — С. 9-66.
- Крохин J1.C. Комплексная система оперативного управления работой грузовой станции. — М., — МИИТ, 1983., — С. 72.
- Телеуправление стрелками и сигналами. / Переборов A.C., Брылеев A.M., Ефимов В.Ю., Кокурин И.М., Кондратенко Л.Ф. — М.: Транспорт, — 1981. -С. 194-210.
- Инструкция по обеспечению безопасного роспуска составов и маневровых передвижений на механизированных и автоматизированных сортировочных горках при производстве работ по техническому обслуживанию и ремонту горочных устройств. № ЦШ-651. — 1999. — 50 с.
- Новые устройства СЦБ в Финляндии. // Железные дороги мира. — 2002. № 12. — С.57-80.
- Храпатый A.B. Повышение безопасности движения на базе новых технических средств. // Железнодорожный транспорт. 2002. № 12. — С. 8-12.
- Новые технические средства для железнодорожного транспорта. // Железные дороги мира — 1997. — №7. — С. 39. (J. Hille. Yerlcebr .d Technik, 1995, №6, s.221-228, №7, s.265-267).
- Информационные технологии управления инфраструктурой железнодорожного транспорта. / Андрианов В.П., Антропов B.C., Райков Г.В., Захаров Я.Л., Подшивалов А.Б., Бакеев Е.Е. // Железнодорожный транспорт. — 1998. -№6.-С. 96-97.
- Елисеев С.Ю. Информационно-управляющие компьютерные технологии. // Железнодорожный транспорт. — 1998. — №7. — С. 18.
- Куммер П.И., Коптева Т.В. Электронные системы автоматики на зарубежных железных дорогах. — М.: — Транспорт, — 1990. — С. 86-100.
- Резников Ю.М. Электроприводы железнодорожной автоматики и телемеханики — М.: Транспорт, — 1985. — 288 с.
- Минаков Е.Ю. Синтез стрелочных электроприводов с внутренним замыканием шибера. Диссертация на соискание ученой степени кандидата технических наук. — Москва, — 1999. — 221 с.
- Минаков Е.Ю. и др. Проведение комплексных лабораторных испытаний макетных образцов винтовых стрелочных электроприводов ВСП-150 и СПВ-2х150: Отчет по НИР. — М.: ВЗИИТ, — 1995. — 244с.
- Стендовые испытания стрелочного электрогидравлического привода L-910H производства фирмы СЭЛ (ФРГ). Технический отчет. С.-Петербург, — 1994. — 30 с.
- Стендовые испытания стрелочного электрогидравлического привода L-710H производства фирмы СЭЛ (ФРГ). Технический отчет. С.-Петербург, — 1994. — 28 с.
- Малышев А.Д., Минаков Е.Ю. и др. Взрезной стрелочный электропривод. Отчет по НИР. Технический проект. ВЗИИТ, — 1991. — 74 с.
- Кондратенко Л.Ф., Минаков Е.Ю., Низовцев В.В., Степанов Ю.С., Ускова H.H., Шуваев В.В. Стрелочный электропривод винтовой взрезной с ходом шибера до 220 мм (СПВВ-2-220): Отчет по НИР. Эскизный проект. ВЗИИТ, — 1993.-81 с.
- Сороко В.И., Милюков В.А. Аппаратура железнодорожной автоматики и телемеханики: Справочник. Кн.1, — М.: НПФ Планета, — 2000. С. 9-76.
- Патент ФРГ. B61L 5/06 № 2632181, 1976.
- Патент № 2181678. Винтовой стрелочный электропривод с внутренним замыканием шибера, взрезной, для работы с внешними замыкателями остряков стрелки и подвижных сердечников крестовин/ Авт. изобрет. Е.Ю. Минаков. — Заявл. 23.12.98 № 981123439.
- Патент № 2181679. Винтовой стрелочный электропривод с внутренним замыканием шибера/ Авт. изобрет. Е.Ю. Минаков. — Заявл. 23.12.98 № 981123440.
- Стрелочный электропривод для механизированных горок с бесконтактным переключателем. Отчет по научно-исследовательской работе. — М.: ВЗИИТ, — 1980. -38 с.
- Талалаев В.И., Сараев В.В., Минаков Е.Ю., Шуваев В.В. Стрелочный электропривод ВСП-150 поставлен на серийное производство. Прочностные параметры, анализ конструкции. // Автоматика, связь, информатика, № 1,-2001, — С. 9-11.
- Шалягин Д.В., Минаков Е.Ю., Шуваев В.В, Лялин B.C. Основные требования безопасности, предъявляемые к стрелочным невзрезным электромеханическим приводам. // В сб. «Высшее профессиональное образование на ж.д. тр-те». М.: — 2001, — С. 124-127.
- Минаков Е.Ю., Шуваев В.В, Титов Н.И. Новые отечественные стрелочные электроприводы. // В сб. «Транспорт: наука, техника, управление» № 8, ВИНИТИ. М:. — 2002, — С. 38-39.
- Инструкция по техническому обслуживанию устройств сигнализации, централизации и блокировки. № ЦШ-720. — 2000. — 81 с.
- Устройства СЦБ. Технология обслуживания. Под ред. Пономаренко М.В. М.: Транспорт, — 1999. — 427 с.
- Ягудин Р.Ш. Надежность устройств автоматики и телемеханики. — М.: Транспорт, — 1989. — 159 с.
- Поскробко A.A. и др. Бесконтактные коммутирующие и регулирующие полупроводниковые устройства на переменном токе. — М.: Энергия, 1978.- 192 с.
- Малышев А.Д., Минаков Е.Ю. и др. Разработка конструкторской документации и испытание опытного образца стрелочного электропривода. Отчет по НИР. Технический проект. ВЗИИТ, — 1992. — 63 с.
- Боденчук Е.В., Минаков Е.Ю., Ускова H.H., Шуваев В.В. Проведение комплексных лабораторных испытаний макетных образцов винтовых стрелочных электроприводов ВСП-150 и СПВВ-3-2х150: Отчет по НИР. Заключительный отчет. — М.: ВЗИИТ, — 1995. — 244 с.
- Сапожников В.В., Сапожников Вл.В., Талалаев В.И. и др. Сертификация и доказательства безопасности железнодорожной автоматики. — М.: Транспорт, — 1997. — 289 с.
- Сапожников P.A. и др. Надежность автоматических управляющих систем. М.: Высшая школа, — 1974. — 245 с.
- Меньшиков Н.Д. и др. Надежность железнодорожных систем автоматики и телемеханики. М. Транспорт, — 1976. — 215 с.
- Стандарт отрасли. ОСТ 32.146-2000. Аппаратура железнодорожной автоматики, телемеханики и связи. Общие технические условия. МПС России. -2000.- 163 с.
- Сороко В.И., Розенберг E.H. Аппаратура железнодорожной автоматики и телемеханики: Справочник. Кн.2, — М.: НПФ Планета, — 2000. С. 408-420.
- Долматов A.A., Цюренко В.Н., Кулик Н.Ф., Новоселов В.В., Селихова О.В. О развитии парка грузовых вагонов. // Железнодорожный транспорт. 2000. — №4. — С. 7-12.
- Вагоны. Учебник для вузов ж.-д. трансп. / Шадур Л.А., Челноков И.И., Никольский E.H., Никольский Л.Н., Котуранов В.Н., Проскурнев П.Г., Казанский Г.А., Спиваковский А.Л., Девятков В.Ф.; Под ред. Шадура Л.А. — 3-е изд., перераб. и доп. — М.: Транспорт, 1985. — С. 5-51.
- Лесин В.В, Лисовец Ю.П. Основы методов оптимизации. — М.: Изд-во МАИ, 1998. — 344 с.
- Сухарев А.Г., Тимохов A.B., Федоров В.В. Курс методов оптимизации. -М.: Наука, 1986.-С. 43-56.
- Нормы технологического проектирования устройств автоматики и телемеханики на федеральном железнодорожном транспорте. / Дмитриев В.Р., Крупицкий А.З., Петров А.Ф., Прокопин Ю.Д., Ушкалов А.И. НТП СЦБ/МПС-99. — 1999, ГУП Гипротранссигналсвязь, — 76 с.
- Глюзберг Б.Э. Оптимизационный подход к проектированию элементов стрелочных переводов // Вестник ВНИИЖТ. — 1991.- № 3.
- Глюзберг Б.Э. Стрелочные переводы нового поколения для железных дорог России // Проблемы железнодорожного транспорта и транспортного строительства: Сборник научных трудов,- Новосибирск: ВНИИЖТ,- 1997. С. 21-24
- Тимошенко С.П. Колебания в инженерном деле. — М.: Наука, — 1976. -С. 244-257.
- Басилов В.В., Чернышов М.А. Справочник инженера-путейца. Т.1 — М.: Транспорт, — 1972. — 768 с.
- Гниломедов В.В. и др. Исследование влияния взреза на элементы электропривода и стрелочную гарнитуру. Отчет по НИР. ЛИИЖТ. — 1983. -89 с.
- Талалаев В.И., Сараев В.В., Минаков Е.Ю., Шуваев В.В. Анализ динамики взреза стрелки с невзрезными стрелочными электроприводами серии СП и ВСП-150. // Автоматика, связь, информатика № 3, — 2001. — С.11-14.
- Фришман М.А. Как работает путь под поездами. -М.: Транспорт, — 1983. -136 с.
- Федотов А.Е., Качмарская O.K. Техническое обслуживание централизованных стрелок. — М.: Транспорт, — 1988. — 95 с.
- Шуваев В.В. Современные методы защиты стрелочного перевода от ложного контроля. Рос. гос. откр. техн. ун-т путей сообщения РФ. -М., 2002. 9 е., библиограф. 4 назв., 2 ил., (рукопись депонирована в ВИНИТИ 10.10.2002, № 1833 -В2002).
- Модин Н.К., Щербаков Е.В. Техническое обслуживание горочных устройств — М.: Транспорт, — 1989. — 126 с.
- Автоматика, телемеханика и связь на железнодорожном транспорте: Учебник для вузов ж.-д. транспорта / Д.В. Шалягин, Устинский, Б.М. Степенский, H.A. Цыбуля и др. — М.: Транспорт, — 2000. — С. 403-503.
- Резников Ю.М. Усовершенствованные устройства управления централизованными стрелками. — М.: ВЗИИТ, — 1979. — 26 с.
- Талалаев В.И., Сараев В.В., Минаков Е.Ю., Шуваев В.В. Обеспечение безопасности движения поездов контрольной системой электропривода ВСП-150. // Автоматика, связь, информатика № 4, — 2001. — С. 11-14.
- Каргалов Н.И. и др. Работа устройств ЭЦ с электроприводом переменного тока. // Автоматика, телемеханика и связь, — 1975. №10, — С. 22-24.
- Инструкция по техническому обслуживанию устройств механизированных сортировочных и автоматизированных горок. № ЦШ-762. — 2001. -89 с.
- Шалягин Д.В. Функциональное резервирование в системах управления движением поездов, их алгоритмическое и программное обеспечение // Автоматика, телемеханика и связь.- 1994. — № 10. — С. 16-18.
- Шалягин Д.В. Безопасные технические средства управления движением поездов. Теория и проектирование. М.: МИИТ. — 1990. — С.27-34.
- Дмитренко И.Е. Техническая диагностика и автоконтроль систем железнодорожной автоматики, телемеханики и связи.- М.: Транспорт, 1986.
- Дмитренко И.Е., Дьяков Д.В., Сапожников В.В. Измерения и диагностирование в системах железнодорожной автоматики, телемеханики и связи. Под ред. И.Е. Дмитренко. Изд. 2-е.- М.: — Транспорт, — 1994. — 423 с.
- Гоман Е.А. Интеграция средств диагностирования с современными ЖАТ. // Автоматика связь информатика. — 2002. №11. — С. 18-21.
- Инструкция по обеспечению безопасности движения поездов при производстве работ по техническому обслуживанию и ремонту устройств СЦБ. №ЦШ-530.- 1998.-97 с.
- Сагайтис B.C., Соколов В.Н. Устройства механизированных и автоматизированных сортировочных горок. Справочник. — М.: Транспорт, — 1979. — С. 32-56.
- Разработка стрелочных электроприводов на новой элементной базе. Научно-исследовательская работа. — М.: РГОТУПС, — 1998. — 37 с.
- Резников Ю.М. Структурный синтез бесконтактного стрелочного электропривода для систем централизации с учетом требований технической диагностики. Сб. трудов ВЗИИТа, вып. 93, — 1978. — С. 32-40.
- Шуваев В.В. Динамика движения остряков в конце перевода стрелки. Рос. гос. откр. техн. ун-т путей сообщения РФ. -М., — 2002. 9 е., библиограф. 4 назв., 1 ил., (рукопись депонирована в ВИНИТИ 10.10.2002, № 1834-В2002).
- Указание МПС № Г-304У от 04.04.96. О введении технологии измерений усилий перевода стрелок и крестовин. — М.: МПС, — 4 с.
- Талалаев В.И., Сараев В.В., Минаков Е.Ю., Шуваев В.В. Анализ тяговых усилий электропривода с внутренним замыканием шибера. // Автоматика, связь, информатика № 2, — 2001, — С. 9-11.
- Талалаев В.И., Сараев В.В., Минаков Е.Ю., Шуваев В.В. Способы установки стрелочных электроприводов ВСП-150 и СП-6. // Автоматика, связь, информатика № 6, — 2001. — С. 18-20.
- Основные принципы построения имитационной модели работы сортировочной станции. / Акулиничев В.М., Апатцев В.И., Иванов-Толмачев И.А., Савина В.М. Учебное пособие. — М.: МИИТ, — 1985. — 248с.
- Глюзберг Б.Э. Классификация дефектов и повреждений элементов стрелочных переводов. — М.: — Транспорт, 1996. 87 с.
- Минаков Е.Ю., Шуваев В.В, Танеев Э.А. Стрелочные электродвигатели переменного тока типа МСА. // В сб. «Транспорт: наука, техника, управление» № 8, ВИНИТИ. М:. — 2002, — С. 39-40.
- Резер С.М. Комплексное управление перевозочным процессом в транспортных узлах. — М.: Транспорт, — 1982. -159 с.
- Повороженко В.В. и др. Эксплуатация железных дорог. — М.: Транспорт, 1982,-С. 79-81.
- Первые итоги внедрения новых методов управления и эксплуатации. // Железные дороги мира — 2000. — №7. — С. 8 (D; Briginshow., International Railway Journal, 2000, №3, p. 11-21).